无人驾驶 如何使用立体视觉实现距离估计 (无人驾驶如何改变未来出行)
双语原文链接: Pseudo-LiDAR — Stereo Vision for Self-Driving Cars
 在自动化系统中,和计算机视觉已经疯狂地流行起来,无处不在。计算机视觉领域在过去十年中发展迅速,尤其是是障碍物检测方面。
在自动化系统中,和计算机视觉已经疯狂地流行起来,无处不在。计算机视觉领域在过去十年中发展迅速,尤其是是障碍物检测方面。
障碍物检测,如YOLO或RetinaNet,提供2D的标注框,该标注框指明了障碍物在图像中的位置。
为了获取每个障碍物的距离,工程师将相机与激光雷达(光探测和测距)传感器融合,使用激光返回深度信息。利用传感器融合技术将计算机视觉和激光雷达的输出融合在一起。
使用激光雷达这种方式存在价格昂贵的问题。而对此,工程师使用的一个有用的技巧是:对齐两个像机,并使用几何原理来计算每个障碍物的距离。我们称这种新设置为 伪激光雷达。

伪激光雷达利用几何原理构造深度图,并将其与物体探测相结合,以获得三维的距离。
如何利用立体视觉实现距离估计?
以下5步伪代码用于获取距离:
1.校准2台照相机(内部和外部校准)
先建立视差图,再建立深度图
然后,深度图将与障碍检测结合在一起,我们将估算边界框像素的深度。本文结尾处有更多内容。
开始吧!
1.内部和外部校准
每个摄像机都需要校准。校准意味着将具有[X,Y,Z]坐标的3D点(世界上)转换为具有[X,Y]坐标的2D像素。
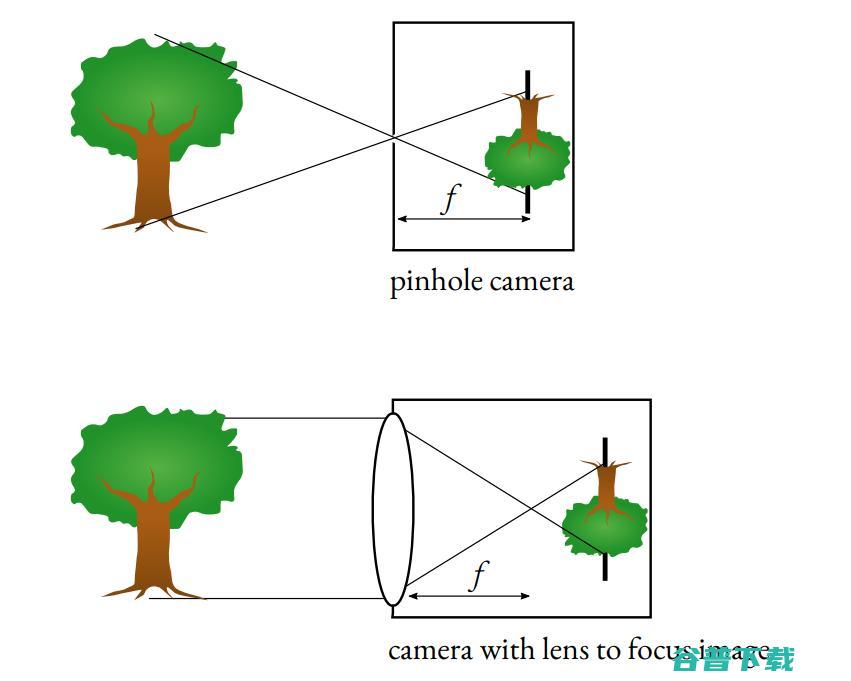
当今的相机使用针孔相机模型。这个想法是使用针孔让少量光线穿过相机,从而获得清晰的图像。
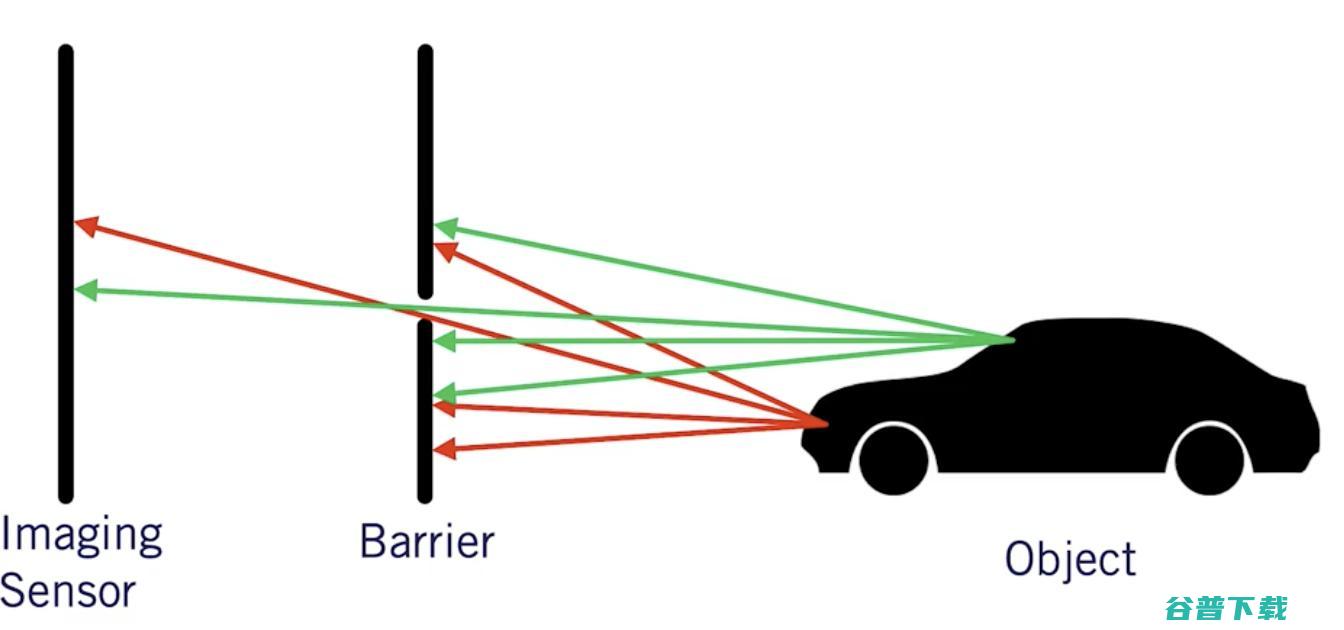
如果图像中间没有障碍物,那么每条光线都会通过,图像会变得模糊。它还使我们能够确定用于变焦和更好清晰度的焦距f。
要校准相机,我们需要将世界坐标转换为通过相机坐标的像素坐标。
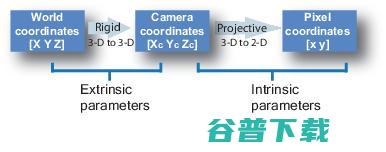
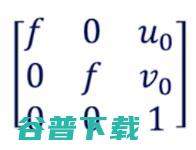
固有参数是我们称为K的矩阵。
过相机校准可以找到K矩阵。
通常,我们使用棋盘格和自动来执行它。 当我们这样做时,我们告诉算法棋盘上的一个点(例如:0,0,0)对应于图像中的一个像素(例如:545、343)。
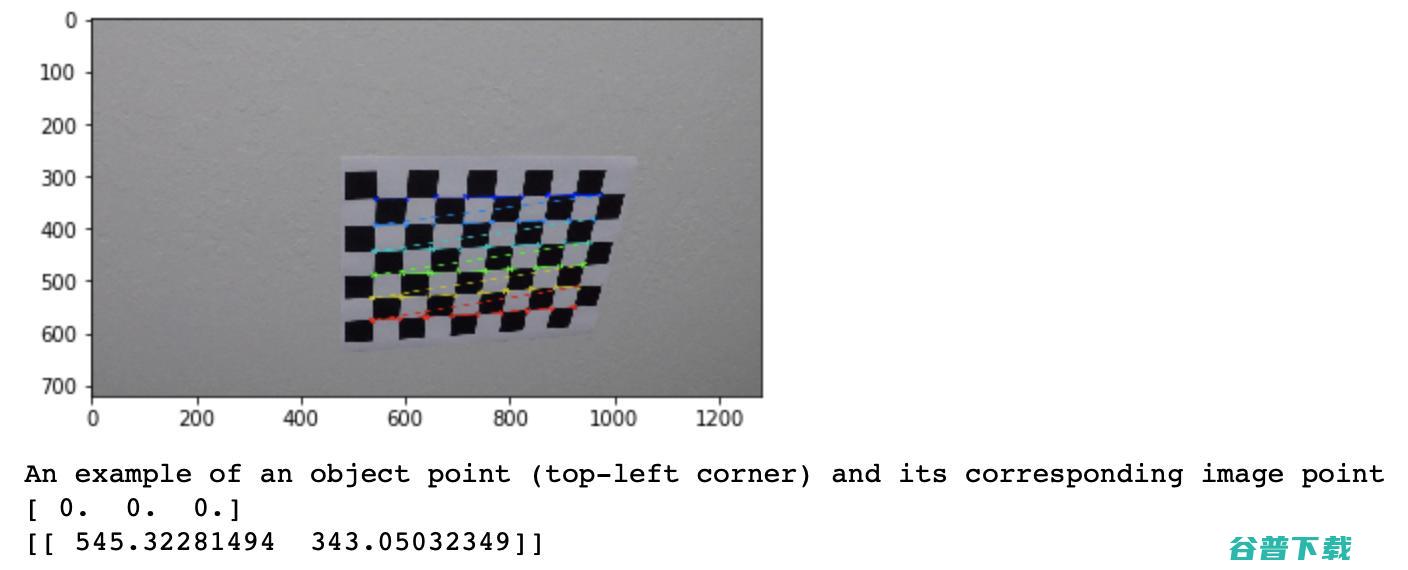
为此,我们必须使用相机拍摄棋盘格的图像,并且在经过一些图像和某些点之后,校准算法将通过最小化最小二乘方损失来确定相机的校准矩阵。
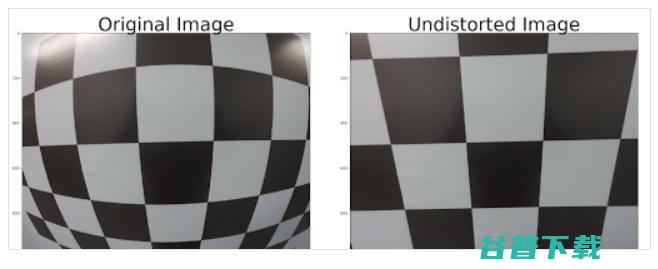
通常,必须进行校准才能消除图像失真。 针孔摄像头模型包括变形,即“ GoPro效果”。 为了获得校正的图像,必须进行校准。 变形可以是径向的或切向的。 校准有助于使图像不失真。
以下是相机校准返回的矩阵:
每一个计算机视觉工程师都必须了解和掌握摄像机的标定。这是最基本、最重要的要求。我们习惯于在线处理图像,从不接触硬件,这是个错误。
-尝试运行OpenCV进行摄像机校准。
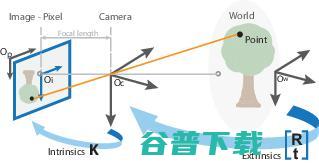
在相机校准过程中,我们有两个公式可以将世界上的点O设为像素空间:
world到相机的转换

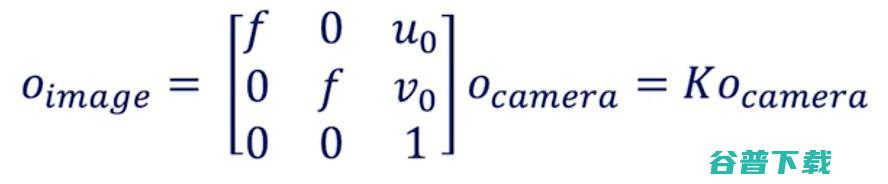
当您进行数学运算时,您将得出以下等式:

如果您查看矩阵尺寸,则不匹配。
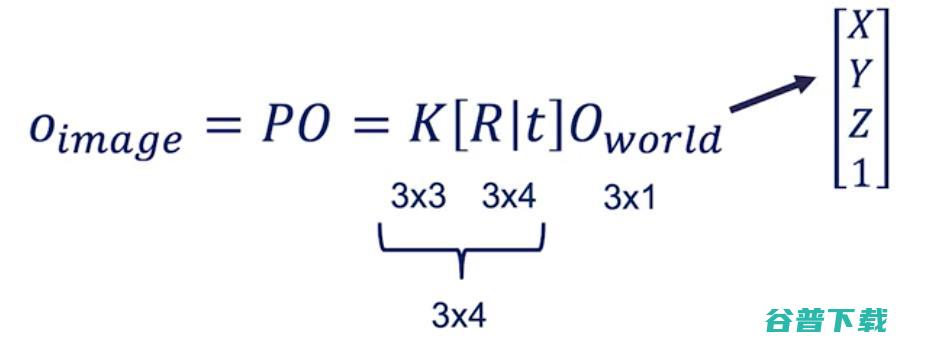
因此,我们需要将O_world从[X Y Z]修改为[X Y Z 1]。
2.极线几何--立体视觉
我们的眼睛就像两个相机。因为它们从不同的角度看同一幅图像,它们可以比对两种视角之间的差异,并计算出距离估计。
下面是立体相机设置的示例。你会在大多数自动驾驶汽车上发现类似的东西。

立体相机如何估算深度
假设你有两个相机,一左一右。这两个相机在相同的Y轴和Z轴上对齐。基本上,唯一的区别就是它们X值不一样。
现在,看看下面的描述。
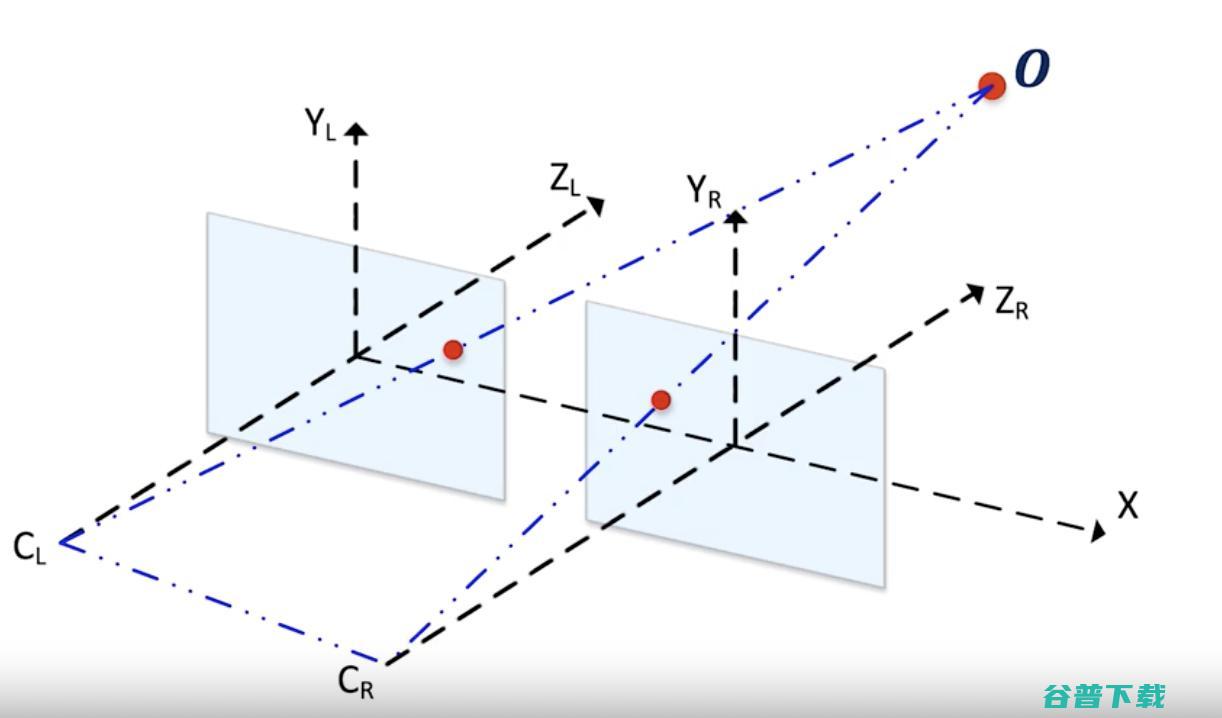
我们的目标是估算出O点(代表图像中的任何像素)的Z值,即深度距离。
现在从鸟瞰的角度来考虑这个问题。
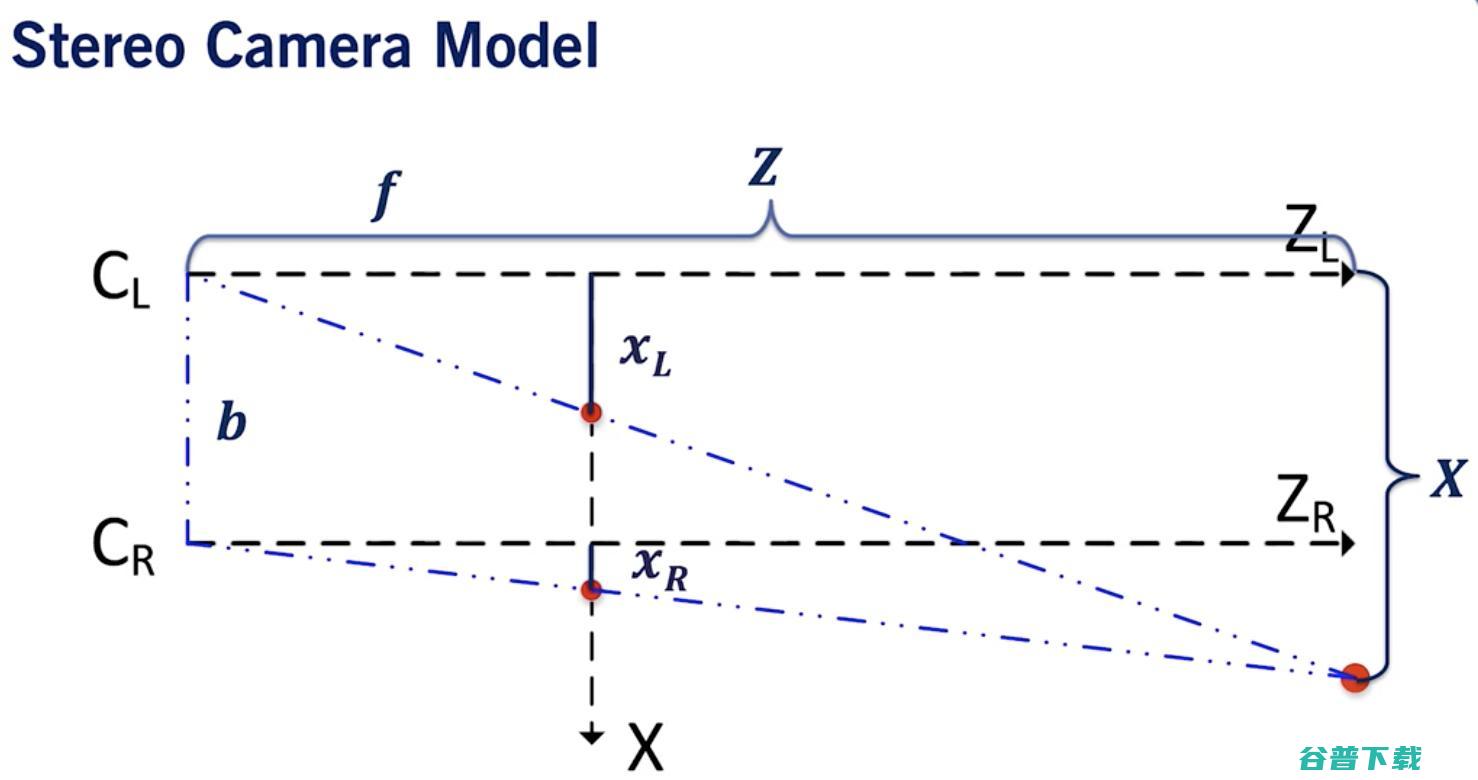
立体相机鸟瞰图说明:
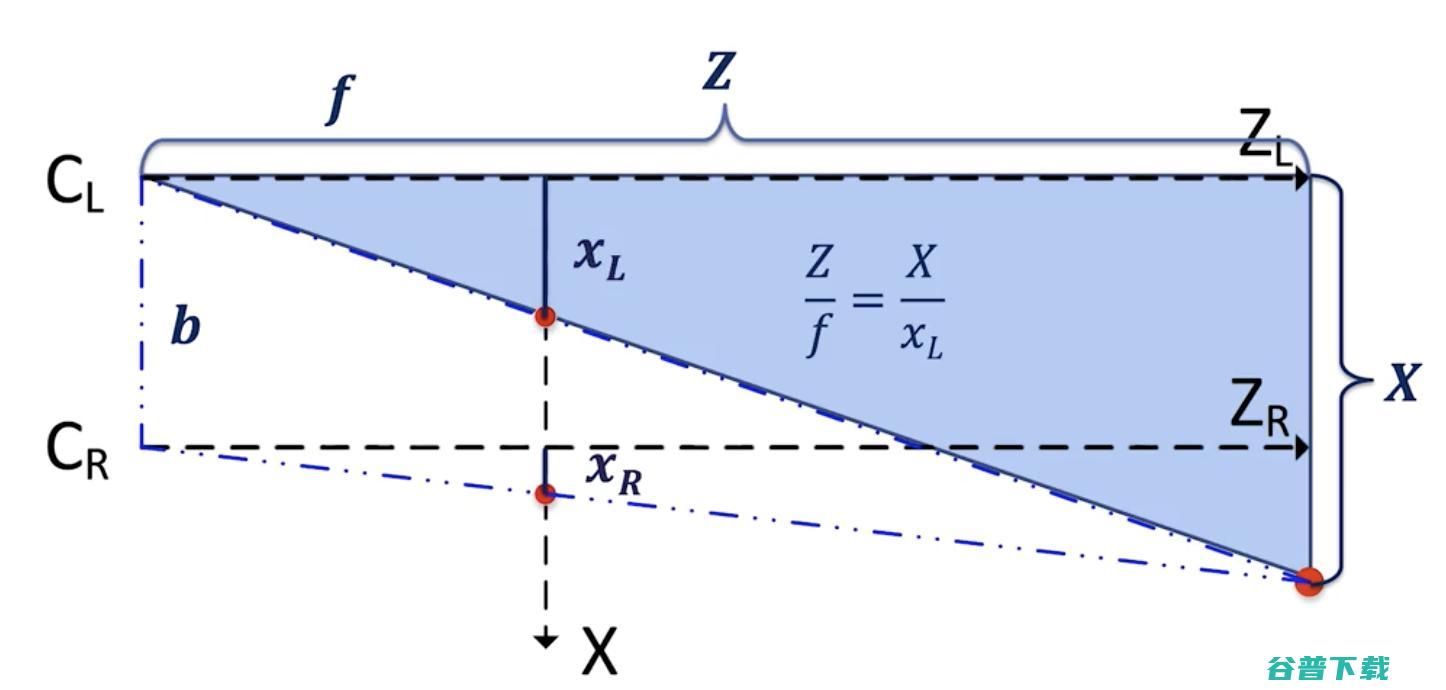
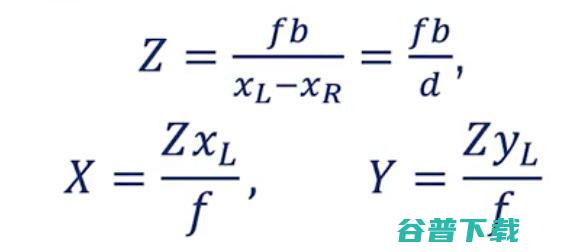
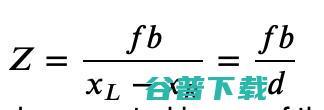
? 我们得到 Z = X*f / xL.
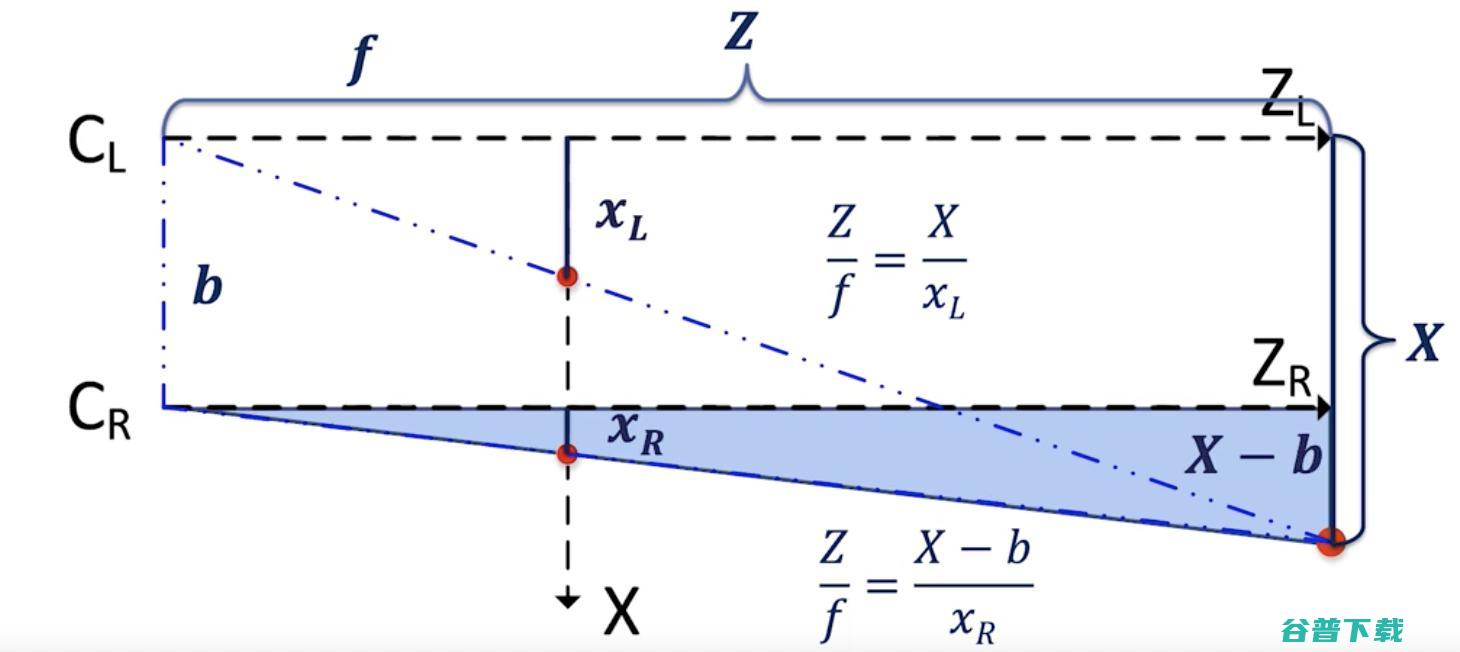
右相机方程:
? 我们获得 Z = (X — b)*f/xR.
放在一起,我们可以找到正确的视差 d =xL -- xR和目标正确的 XYZ 坐标。
3. 视差与深度图
视差是什么?视差是一个三维点从两个不同的相机角度在图像中位置的差异。
? 由立体视觉我们可以估计任何物体的深度。假设我们做了正确的矩阵校准。它甚至能够计算一个深度映射或者视差映射。
为什么是“基线几何”?要计算视差,我们必须从左图像中找到每个像素,并将其与右图像中的每个像素进行匹配。 这称为立体对应问题。
为了解决这个问题--
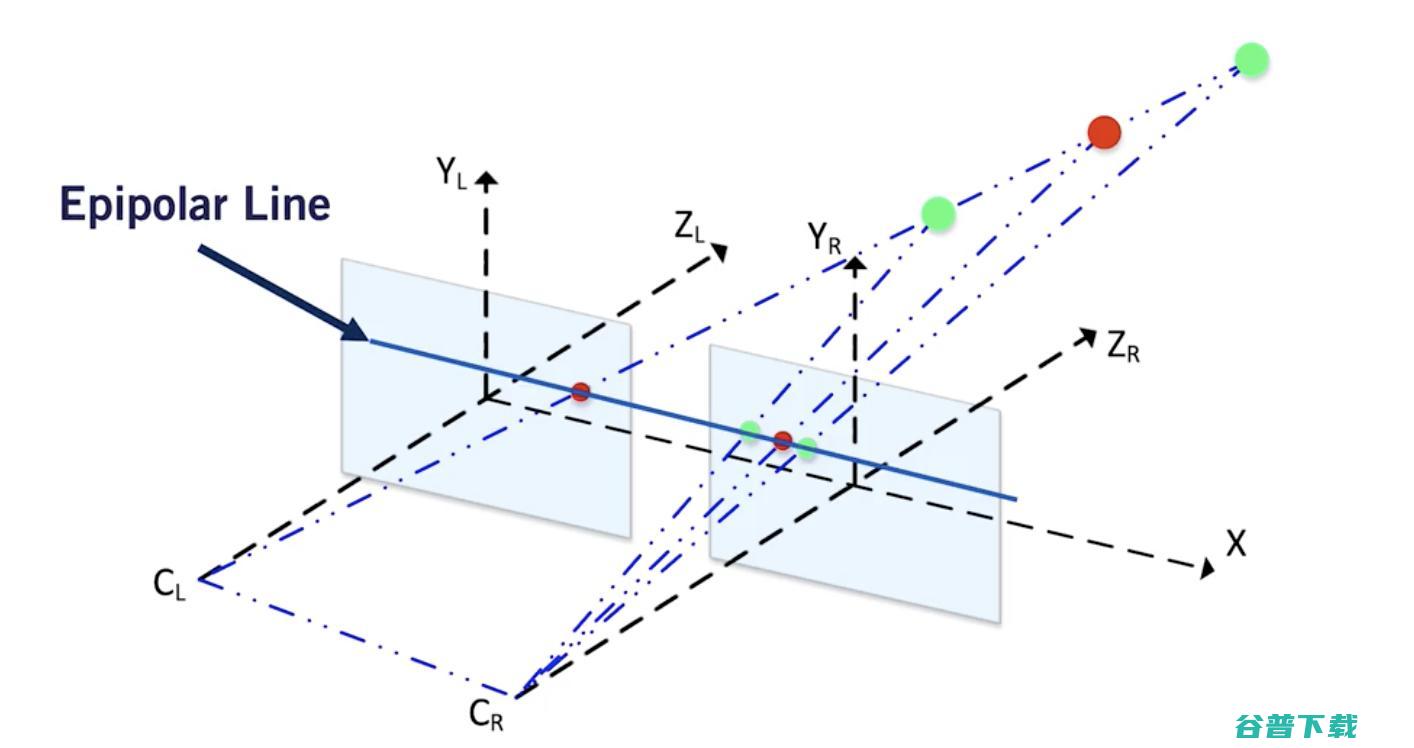
这是因为两个相机是沿着同一轴对齐的。
以下是基线搜索的工作原理:
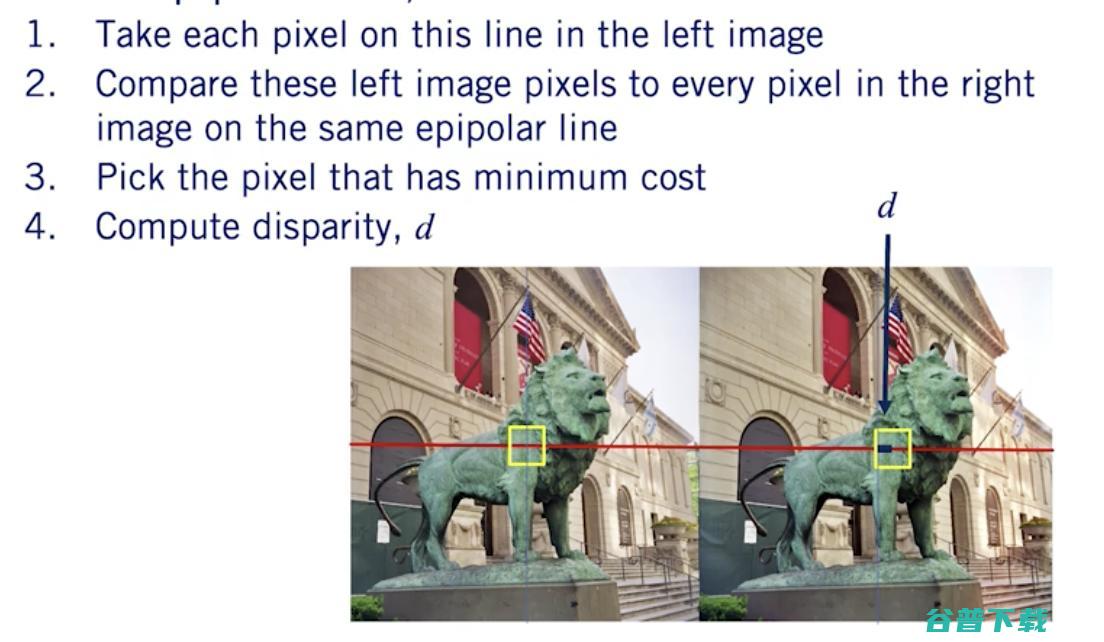 基线搜索
基线搜索
应用:建立伪激光雷达
现在,是时候将这些应用到真实世界的场景中,看看我们如何用立体视觉来估计物体的深度。
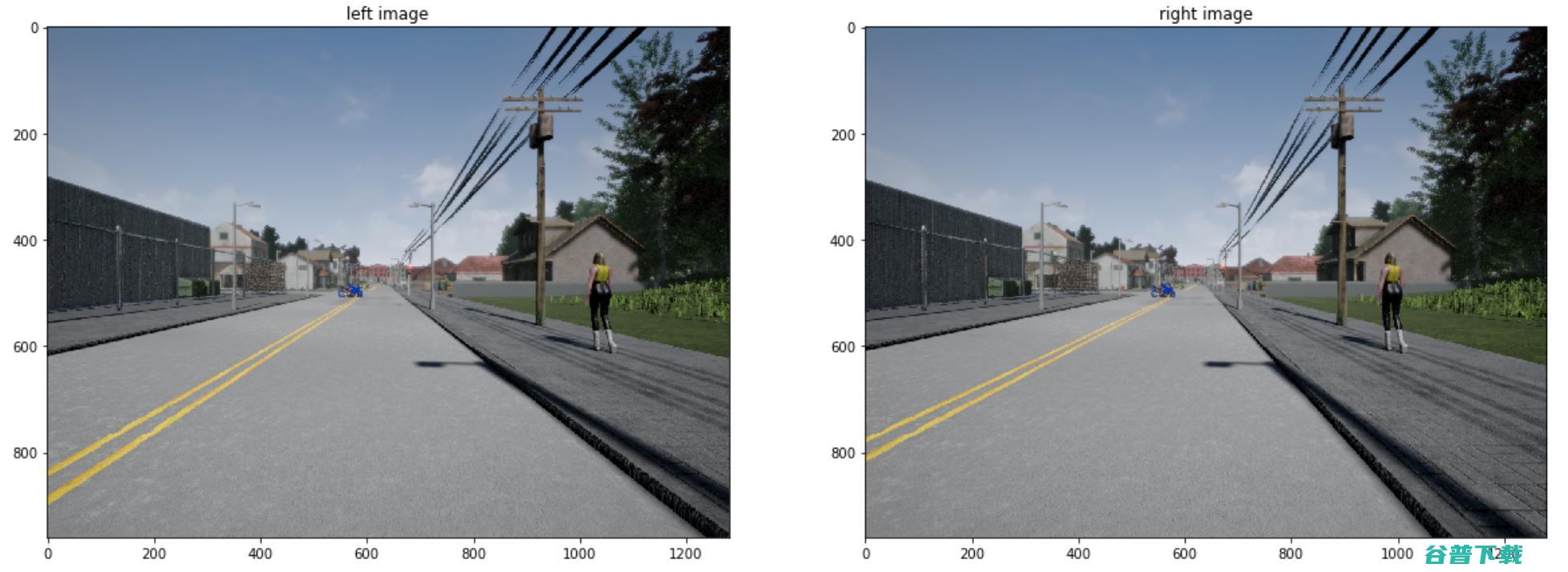
每一幅图像都有外部参数 R 和 t,事先通过校准确定(步骤1)。
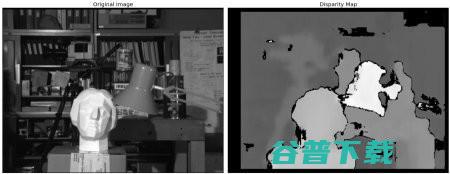
视差
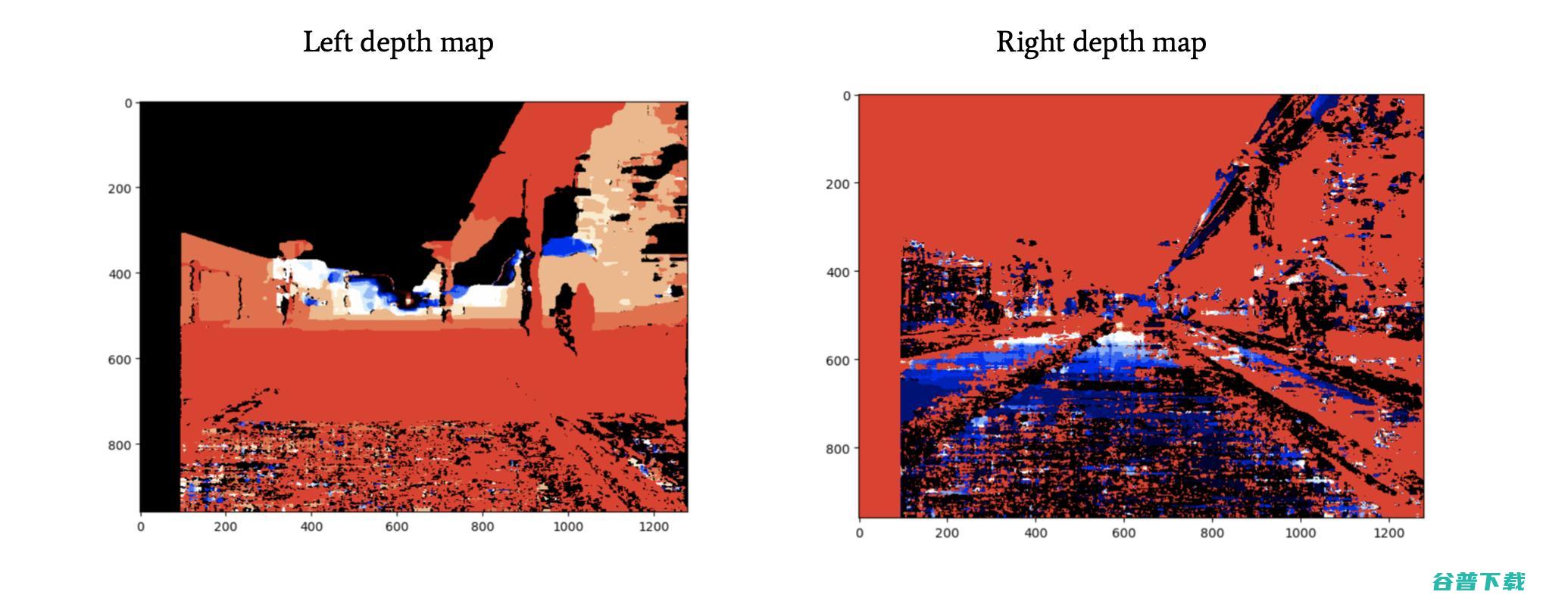
对于每一幅图像,我们可以计算相对于另一幅图像的视差图。我们将做如下操作:
我们将获得左右图像的视差图。
为了帮助您更好地理解差异的含义, 我在 Stack Overflow 上找到了一个很棒的解释 。
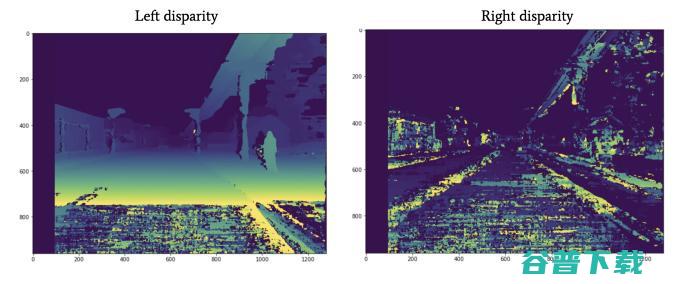
从视差到深度图
? 我们有两个视差图,这基本上告诉我们,两幅图像之间的像素位移是多少。
对于每个摄像机,都有一个投影矩阵 P_left 和 P_right。为了估计深度,我们需要估计K, R 和 t。

世界坐标系到相机坐标系的转换
cv2.decomposeProjectionMatrix()的OpenCV函数可以做到这一点,并从 P 中得到 K、R 和 t;对于每个相机,现在是时候生成深度图了。深度图将使用其他图像和视差图告诉我们图像中每个像素的距离。
我们对每个像素进行计算。
估计障碍物的深度
针对每个相机,我们都有一个深度图! 现在,假设我们将其与障碍检测(例如YOLO)结合在一起。 对于每个障碍,这种算法都会返回带有4个数字的边界框:[x1; y1; x2; y2]。 这些数字表示框的左上角和右下角的坐标。
例如,我们可以在左边的图像上运行这个算法,然后使用左边的深度图。
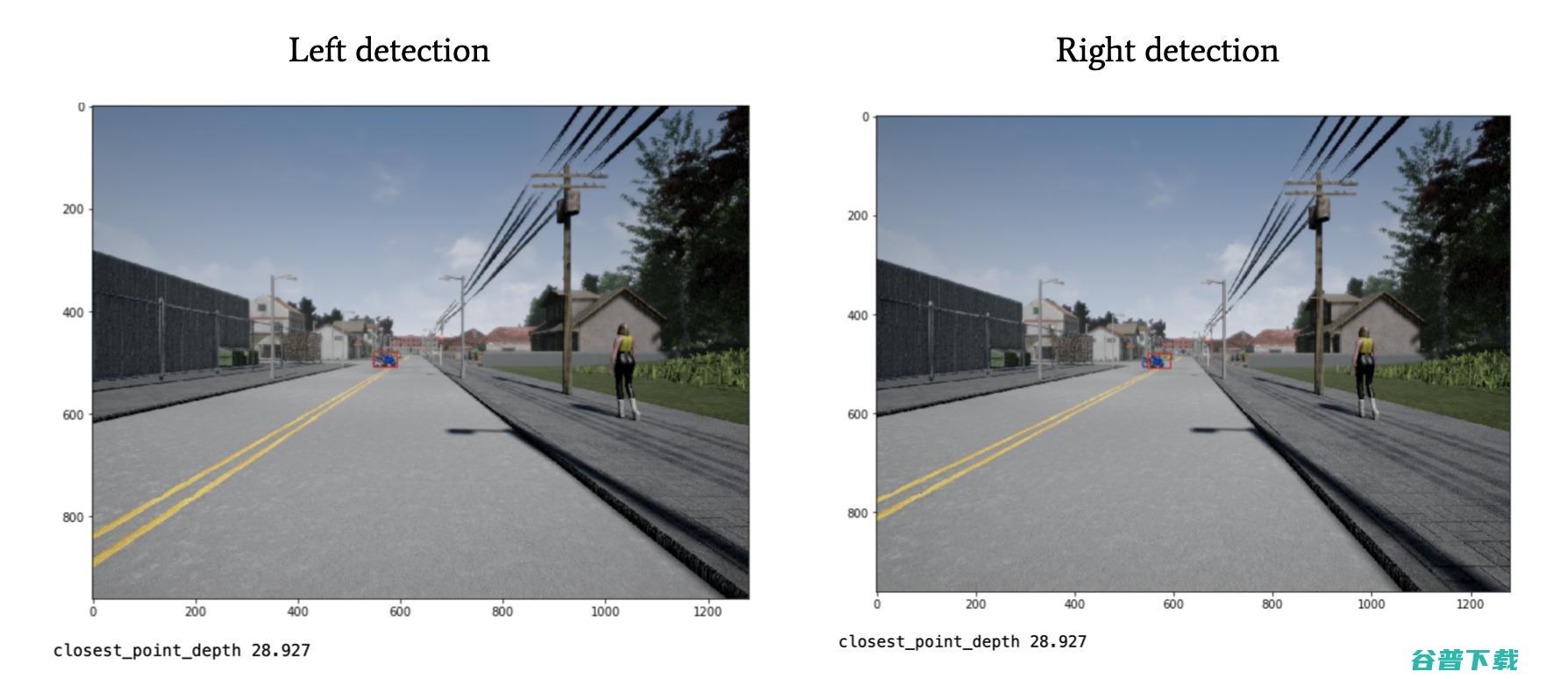
真不可思议!我们刚刚构建了伪激光雷达!
借助立体视觉,我们不仅知道图像中的障碍物,而且知道它们与我们的距离! 这个障碍距离我们28.927米!
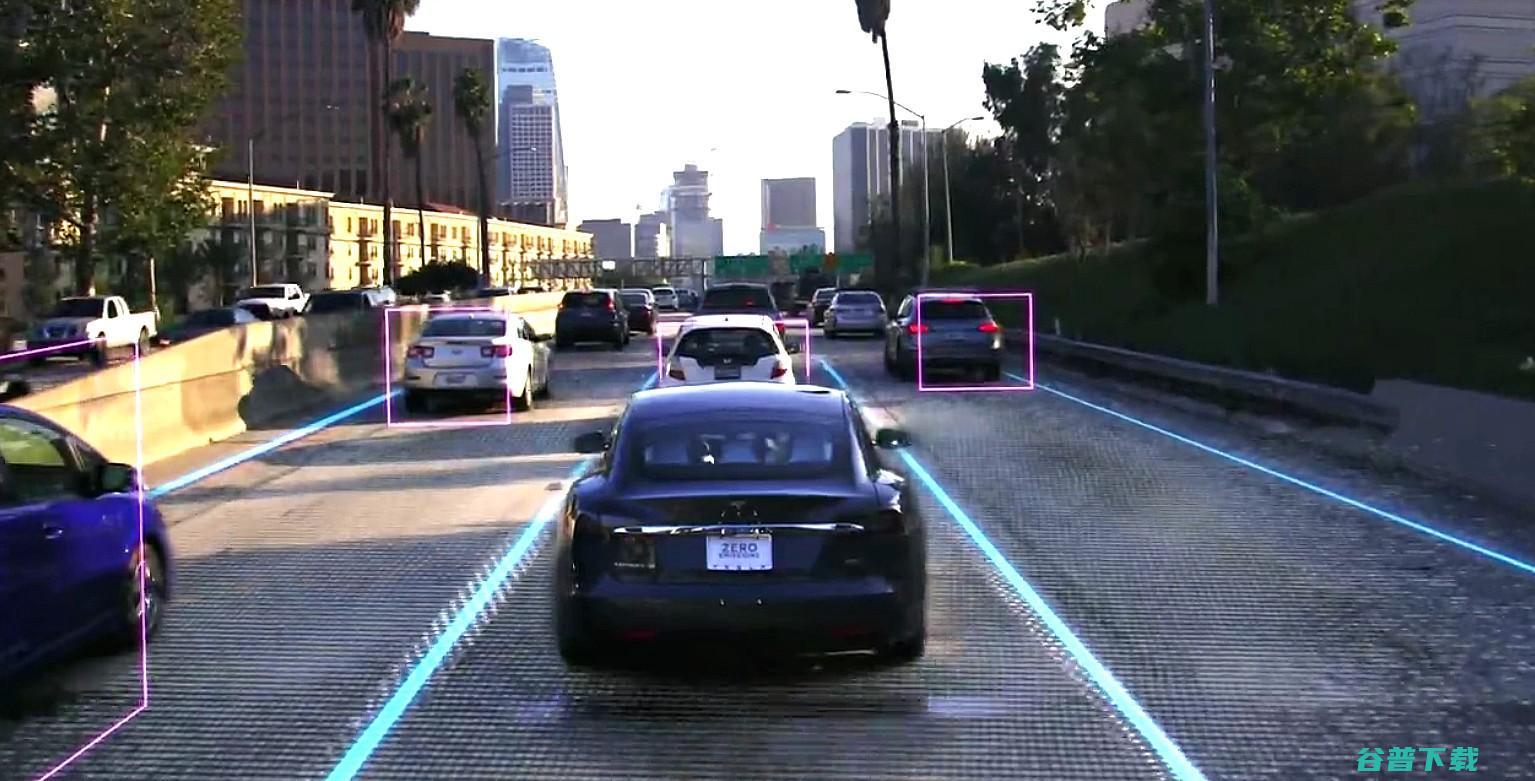
立体视觉是一种使用简单的几何图形和一个额外的摄像机将2D障碍物检测转换为3D障碍物检测的技术。如今,大多数新兴的edge平台都考虑了立体视觉,比如新的OpenCV AI Kit或对Raspberry和Nvidia Jetson卡的集成。
在成本方面,与使用LiDAR相比,它保持相对便宜,并且仍具有出色的性能。我们称它为伪激光雷达,因为它可以取代激光雷达的功能。检测障碍物,对障碍物进行分类,并在3D中进行定位。
AI研习社是AI学术青年和AI开发者技术交流的在线社区。我们与高校、学术机构和产业界合作,通过提供学习、实战和求职服务,为AI学术青年和开发者的交流互助和职业发展打造一站式平台,致力成为中国最大的科技创新人才聚集地。
如果,你也是位热爱分享的AI爱好者。欢迎与译站一起,学习新知,分享成长。

版权文章,未经授权禁止转载。详情见 转载须知 。

本文地址: https://www.gpxz.com/article/99949b76837d5dd00850.html



好课件为您提供精美小学、初中、高中所有语文、数学、英语、科学、化学、物理、生物、历史、地理、道德与法治等PPT课件,好课件将全力打造专业高品质的PPT课件资源下载网站。

注册公司、代理记账

宏瑞(烟台)汽车销售有限公司创造了新的汽车品类—小虎家用电车,从事新能源汽车整车和核心部件的研发,制造,销售和服务等业务.拥有了集成式电驱动桥、电控、新型悬架,轻量化车身等核心技术

深圳博智达专业生产直线电机、线性电机、线性模组、直线电机模组、直线导轨、直线模组、DD马达、大理石龙门模组、直线滑台、环形直线电机等产品,可定制高端环形直线平台,面向深圳、东莞、广州、常州、苏州、无锡等各地客户服务。

上海大屏租借公司首选万好led电子屏电话15050474155,十九年上海舞台搭建经验,专业提供上海音响租赁,线阵音箱出租,光束灯出租,面光灯租借,追光灯,会场搭建,场地布置,雷亚架,led户外借水屏,高清电子显示大屏幕,电视机租赁一条龙服务.万好音箱上海会场搭建布置公司【搭建老品牌】免费获得解决方案.

颂量国际验证码是一家专业的国际短信平台,为企业提供国际短信、国际语音、邮件群发等服务,业务范围覆盖全球,99.99%高到达率,致力于为客户提供优质的短信接口,短信通道,企业短信接口等服务。

河北鼎力管业有限公司

「元琛科技」:元琛科技20年专注于研发和应用高效低温SCR蜂窝脱硝催化剂「脱硝产品」:超低温/高温、电力、锅炉、玻璃窑炉水泥行业SCR脱硝催化剂「厂家热线」:13635693238「微信同号」

张家港市凯迪机械有限公司是国内专业生产平板式,吊袋式,全自动,三足式离心机及配件的机械企业,对离心机的设计,研究,制造已有几十年的历史

定州市羽航网络工作室

畅行云服务器ECS是可弹性伸缩且安全可靠的弹性计算服务,且为用户提供国内及海外具备DDoS防护能力的云服务器、高防服务器、裸金属服务器租用,轻松解决各类云服务难题.

电话:13630818340,七星网络是专业从事互联网相关业务开发的公司,主要经营:衡水网站建设,衡水网站制作,衡水网页设计,衡水网站优化,衡水seo优化,衡水小程序开发,衡水公众号开发,衡水网站推广,衡水关键词优化,企业视频等专门提供全方位的优质化服务和专业的网站建设方案,为企业打造全新电子商务平台。成熟的技术实力和完善的运营服务体系是七星网络IT应用服务的根基。


哈喽大家好,小编又来了!今天来给大家介绍的游戏主题是和数学有关的游戏在哪里下载,好玩的数学游戏不仅能愉悦身心,还能在闲暇的游戏时光里锻炼自己的数学逻辑思维能力,岂不是一箭双雕之法,不管是大人小孩,数学的奥秘对我们来说都是无穷无尽的,孩子爱玩游戏是天性,家长朋友们想借游戏发展孩子思维,小编有几下几款手游推荐,1、,华容道经典闯关,华容...。

荒野生存建造游戏哪些值得玩,在这片黑暗而危险的荒野中,生存不仅仅是一场战斗,更是一次自我超越的旅程,通过构建坚固的避难所、与其他幸存者合作、对抗未知威胁以及勇敢地探索,你将逐步掌握荒野求生的艺术,现在,拿起你的装备,踏上这段充满挑战与机遇的旅程,看看哪一款游戏能成为你末日穷途的标配!1、,艾兰岛,玩家可以组建自己的队伍,与其他玩家进行...。

串串是在火锅的基础上进行简化,让用餐变得更加的便捷随性,并且在售价方面是有一定的优势,几毛钱一串的食材,都是在大家可以消费得起的范围之内,这也是成为了这一行业,快速稳定发展的原因之一,签王之王串串将四川火锅风味的底蕴进行融入到门店产品的制作中,为消费者打造的美食盛宴,给予味蕾上的满足,并且门店的环境,还有服务方面所投入的用心,都是成为...。

相信很多人都碰到过像这样的烦恼,一个手机号用了很长时间,所有的APP等等都绑定到这么一个手机号上,但是月租套餐还不便宜,想改一下套餐客服却说改不了,其实这个东西是可以修改的,我们今天说的创业项目玩的就是一个信息差,其实市面上很多副业的演变都是靠的信息差的,流量方面我们可以利用自媒体短视频各大平台进行引流,也可以到闲鱼拼多多等等各大电商...。

近日,网传山东东营出现一同恶性伤人事情致3人受伤,其中包含老人和妇孺,引发社会关注,视频显示,一男性在车辆旁持械行凶,在爱心筹款平台上,有网友发文称,自己25岁的妻子、4个月大的儿子,以及岳母,于7月3日在小区出现车祸,被送医抢救,,三人都是脑出血加多处骨折,孩子姥姥还有我儿子在重症监护室,7月11日,知情人通知@中国资讯周刊,凶手...。

拯救射手女水瓶男友须要先了解两个星座的特点,射手女是充溢激情和生机的,青睐自在自在地执行,热爱冒险,始终谋求新的事物,而水瓶男则是十分独立和自我看法剧烈的人,有着富裕发明性的思想模式,青睐钻研迷信和技术,因此,假构想要拯救射手女水瓶男友,须要展现出自己的激情和发明力,让他们看到你的魅力,同时也须要给予他们足够的空间和自在,拯救射手女水...。

新京报讯据,首都之窗,信息,近日,北京市教委颁布,对于进一步增强中小在校生校服治理上班的意见,征求意见稿,简称,意见,,向社会地下征求意见,意见,包含实际提高站位、严厉实行职责、强化选择治理、规范洽购流程、严厉质量监管、遵照市场准则、强化监视问责等八大局部,共22条内容,意见,提出,在深化论证和与家长委员会充沛沟通的基础上,...。

大音希声,大象有形,,在悠长的历史之河中,文明之流悄悄涌动,恰似,大音,大象,,虽希声有形,却能震动灵魂深处的共鸣,这份共鸣,也在2024,打卡中国·古韵潮音——你好,江苏!,网络国际流传优惠中得以表现,响彻在江苏这片福泽之地上,本国网红合影在中华门合影纪念摄影陈小雨6月20日,26日,7天时间,10位本国网红与4名中央广播电视总...。

雪佛兰景程一共经常使用的是两款发起机,一辆是1.8升人造吸气发起机,另外一款是2.0升人造吸气发起机,雪佛兰景程是雪佛兰旗下的一辆中型汽车,这一款车的长宽高区分是4808毫米,mm,,1807毫米,mm,,1450毫米,mm,,轴距为2700毫米,mm,雪佛兰景程的1.8升人造吸气发起机最大功率是105kw,最大扭矩为175牛米,这...。

郑博士:龙年哪些日子出生的人冲犯太岁?_郑博士_新浪博客,郑博士,

网站专题,提供网站的相关文章和相关资讯,在本栏目你可以看到网站这个内容的相关各类文章很多篇,如有不足请提供给我们更多网站的文章供大家查阅.

重庆分类目录网站将2010年09月共344个网站收录信息按收录时间分类整理归档列表,可以方便网友浏览按年月查询,更好地享受精彩网站的魅力!

千万不要用AI创作,尤其是原文照搬,不要用ai,不要用,不要用,重要的事情说三遍,近日ID名为,爸爸在家赚钱,用AI写了4,5篇文章投稿在百家号,随后百度就把他帐号封了,随着AI的平民化,越来越多的自媒体平台开始封禁用AI写文章的帐号了,目前已经会封禁的平台有,百家号、知乎、简书、小红书,当然有更多的平台会对AI写作的文章进行限流,这...。

该团队是foxmail带来的,老大就是现在微信的张小龙,据说是腾讯内部小马哥亲自认可的唯一两个七星级团队之一,另外一个是即时通讯,QQ,团队,而这两个产品均是马化腾深度参与在里面的,可以分享如下几点,1、QQ邮箱是典型的从无到有,从落后到超越的产品,虽然有QQ引入流量,但确实确保了用户体验,并且普遍在业界来说是受到赞赏的,2、无盈利压...。

百度医疗再起风波,百度回应称是医院名称和简称存在语义相似性,误导了网民的选择,今天,针对百度搜索品牌官网、公立医院的几个问题,百度官方特意做了详尽的解释,一起来看看,1、搜索品牌时如何确保进入的是官网?在百度搜索品牌名称如,华为,、,海尔,时,结果页会显示,官网,标志,代表该网站通过了百度的官方认证,是品牌的官方网站,除品牌官网标志外...。

雷锋网按,本文整理自CCF,GAIR全球人工智能与机器人峰会上,金山软件CEO兼金山云CEO张宏江的演讲,为什么过去几年人工智能有着这么快速的进步,张宏江认为,这最终归结到大数据的进步和云计算的发展,人工智能的进展很大程度归功于数据的进展,全球产生消费的数据,2013年2020年将增长10倍,年增长率40%,微信一天在朋友圈里交换的图...。

文字链接认证代码普通联盟标志认证代码企业广告联盟标志认证代码广告联盟评测代码说明,本页面的认证代码为Yes玩网页游戏联合运营专用评测代码,站长需懂简单html知识,直接复制代码粘贴到联盟网站相应页面即可使用,本代码不适用于其他广告联盟网站请勿获取!文字认证,文字链接代码认证适用所有类型的广告联盟,复制代码后放在Yes玩网页游戏联合运营...。
