清华大学获X (清华大学获芯片领域重要突破!)
来自清华大学的高阳团队在最新一届机器人顶级会议 CoRL 2024(Conference on RoBot Learning)中荣获 X-Embodiment Workshop 最佳论文奖。
CoRL 是全球机器人学习领域的顶级学术会议,每年汇聚来自全球顶尖学府的创新研究,评选出的最佳论文通常代表着前沿技术与重大突破。
清华团队此次获奖的论文标题为《Data Scaling Laws in Imitation Learning for Robotic Manipulation》,关注的是数据规模定律在机器人操作中的模仿学习中的应用,尤其是能否通过适当的数据规模来实现零样本泛化。
研究团队收集了超过 40,000 次展示,并进行了 15,000 多次机器人实测。结果表明,策略的泛化能力主要依赖于环境和对象的多样性,而非单纯的展示数量。
在此基础上,他们设计了一种高效的数据收集方案,仅需四个采集者花一下午便能获取足够数据,使两个任务在新环境和新对象上的成功率达到约 90%。
随后,团队将机器人部署在各种野外环境中,包括火锅店、咖啡馆、电梯、喷泉和其他以前未收集数据的地方。结果显示,模型在这些全新的环境中展现出极好的泛化能力,超出预期。
这篇论文的作者是来自清华大学交叉信息研究院的高阳和他的学生林凡淇、胡英东、盛平岳、Chuan Wen、游嘉诚,其中林凡淇、胡英东、Chuan Wen 同属于上海期智学院和上海人工智能实验室。
论文链接:
项目网址:
代码:
数据:
实验设计
研究团队选择使用手持夹持器(UMI)在不同环境中收集人类展示数据,并使用扩散策略(Diffusion Policy)对数据进行建模,主要研究了策略的泛化性能如何随着训练环境数量、物体数量和展示数量的变化而变化。
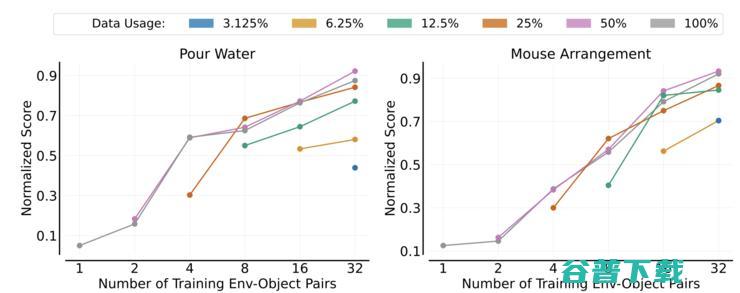
实验选择了 Pour Water(倒水)和 Mouse Arrangement(鼠标移动)作为案例研究任务,并在此基础上扩展到 Fold Towels(叠毛巾)和 Unplug Charger(拔掉充电器)任务,收集了超过 40,000 次展示,并在超过 15,000 次实际机器人操作中进行了评估。
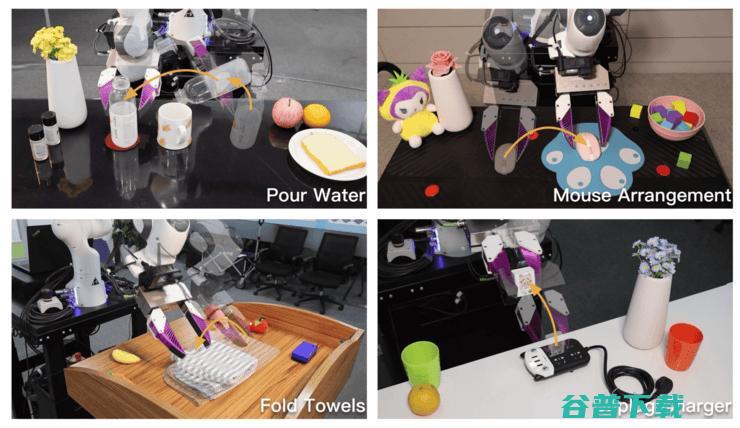
具体的实验任务分为对象泛化、环境泛化以及跨环境和对象泛化三种类型,分别针对同一环境下的不同物体、不同环境下的同一物体和不同环境下的不同物体收集展示,随机选择部分展示进行训练,并评估策略在未知情况下的的表现。每个实验设置下,策略在 8 个未见过的环境中进行评估,每个环境有 5 次试验。

研究结果
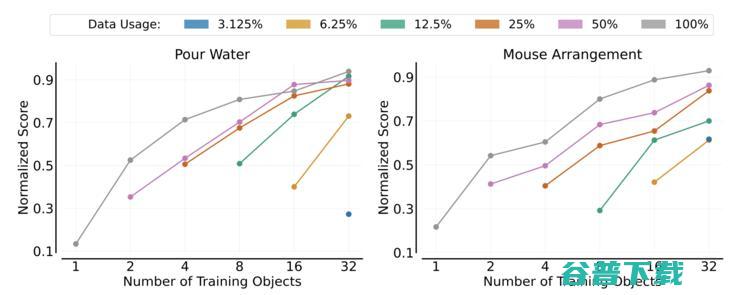
实验结果表明,策略的泛化能力与训练物体数量、环境数量和训练环境-物体对数关系密切,符合幂律分布。
对象泛化
随着训练物体数量的增加,策略在未见过的物体上的表现显著提高。当训练物体数量达到 32 时,策略在未见过的物体上的表现超过了 0.9。
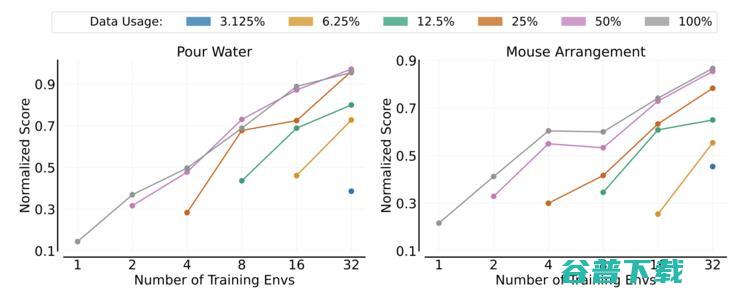
环境泛化
增加训练环境数量显著提高了策略在未见过的环境上的表现。即使展示数量保持不变,环境扩展仍然有效。
跨环境和对象泛化
同时增加环境和物体数量显著提高了策略的泛化能力。与单独扩展环境或物体相比,同时扩展两者的效果更好,且额外的展示对性能的提升更快饱和。
作者介绍
林凡淇

林凡淇,清华大学交叉信息研究院 (IIIS) 的一年级博士生,指导老师是高阳教授。此前在清华大学计算机科学与技术系获得学士学位。
他的研究重点是 Embodied AI(具身智能),这是一个集成机器人、计算机视觉和自然语言处理的跨学科领域。具体来说,他的目标是使机器人能够通过大规模数据实现人类水平的操作能力。同时,他还热衷于利用基础模型来增强机器人的能力。
胡英东

胡英东,清华大学交叉信息研究院 (IIIS) 的四年级博士生,指导老师是高阳教授。此前在北京邮电大学 (BUPT) 获得学士学位。
他的研究重点也是具身智能,他研究了开发通用机器人系统的基本挑战,这些系统可以在各种非结构化的现实世界环境中有效地适应和推广其学习行为。
盛平岳

盛平岳,清华大学交叉信息科学研究院 (IIIS) 姚班的一名本科生。他的研究兴趣集中在机器人技术、模仿学习和算法上。

Chuan Wen,清华大学交叉信息科学研究院 (IIIS) 的博士生,指导老师是高阳教授,同时与宾夕法尼亚大学 GRASP 实验室的 Dinesh Jayaraman 教授密切合作。此前在上海交通大学电子工程系获得学士学位,师从张亚教授和王新兵教授。他目前还是伯克利人工智能研究 (BAIR) 的访问学者,由 Pieter Abbeel 教授和林星宇博士指导。
游嘉诚
游嘉诚,清华大学交叉信息研究院 (IIIS) 的一年级博士生。
高阳
高阳,上海期智研究院 PI,清华大学交叉信息研究院助理教授。于美国加州大学伯克利分校获得博士学位,师从 Trevor Darrell 教授。在获得博士学位后,于加州伯克利大学与 Pieter Abbeel 等人合作完成了博士后研究。研究方向为强化学习与机器人。
高阳博士目前主持具身视觉与机器人实验室 (Embodied Vision and Robotics,简称EVAR Lab),专注于利用人工智能技术赋能机器人,致力于打造通用的具身智能框架。
最佳论文奖
本次 CoRL 2024 也已经宣布了最佳论文的获奖名单,分别为来自 Kuo-Hao Zeng 等人的《PoliFormer: Scaling On-Policy RL with Transformers Results in Masterful Navigators》,和来自 Franck Djeumou 等人的《One Model to Drift Them All》。
PoliFormer: Scaling On-Policy RL with Transformers Results in Masterful Navigators
论文作者: Kuo-Hao Zeng, Zichen Zhang, Kiana Ehsani, Rose Hendrix, Jordi Salvador, Alvaro Herrasti, Ross Girshick, Aniruddha Kembhavi, Luca Weihs

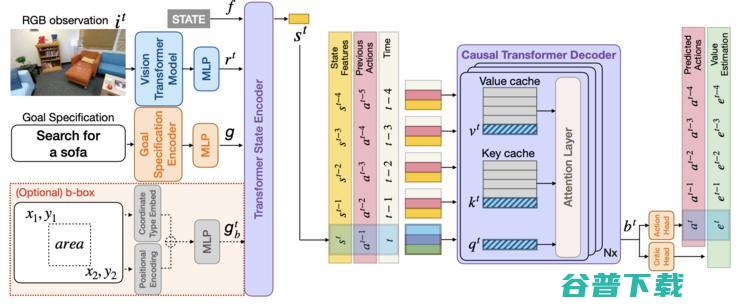
论文摘要: 研究团队提出了 POLIFORMER(Policy Transformer),这是一个仅使用 RGB 的室内导航代理,通过端到端的强化学习在规模上进行训练,并且能够在没有适应的情况下泛化到现实世界。
POLIFORMER 使用了一个基础的视频变压器编码器和因果变压器解码器,实现了长期记忆和推理能力。它经过数亿次交互,在各种环境中进行了训练,利用并行化和多机部署以实现高效训练和高吞吐量。
POLIFORMER 是一个精通的导航器,在两个不同的实施例中——LoCoBot 和 Stretch RE-1机 器人,以及四个导航基准测试中都产生了最先进的结果。它突破了以往工作的局限,实现了 CHORES-S 基准测试中前所未有的 85.5% 的成功率,绝对成功率提高了 28.5%。
POLIFORMER 还可以轻松扩展到多种下游应用,如物体跟踪、多对象导航和开放词汇导航,无需微调。
One Model to Drift Them All: Physics-Informed Conditional Diffusion Model for Driving at the Limits
论文作者: Franck Djeumou, Thomas Jonathan Lew, NAN DING, Michael Thompson, Makoto Suminaka, MARCus Greiff, John Subosits
论文摘要: 如果使自动驾驶车辆能够在轮胎力饱和的极限条件下可靠运行,将提高它们的安全性,特别是在紧急避障或恶劣天气等场景中。然而,解锁这一能力由于任务的动态本质和对道路、车辆及其动态相互作用的不确定属性的高敏感性而具有挑战性。
受到这些挑战的启发,研究团队提出了一个框架,利用包含不同环境中不同车辆轨迹的无标签数据集,学习用于高性能车辆控制的条件扩散模型。
研究团队设计的扩散模型能通过物理信息驱动的动力学模型的多模态参数分布来捕捉复杂数据集的轨迹分布。通过在生成过程中进行在线测量,将扩散模型集成到实时模型预测控制框架中,用于在极限条件下驾驶,并展示了它能够即时适应给定的车辆和环境。
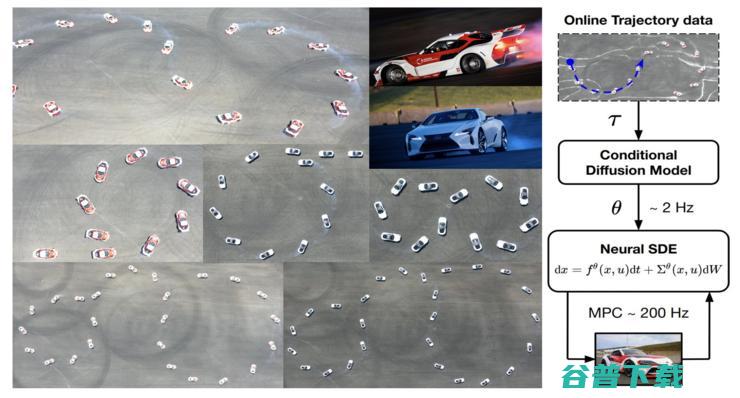
在丰田Supra和Lexus LC 500上的广泛实验表明,单个扩散模型在操作时能够在不同轮胎和不同道路条件下可靠地实现自动驾驶漂移。
该模型在特定任务上的专家模型的性能匹配,同时在泛化到未见条件方面表现优于它们,为自动驾驶在处理极限下的通用、可靠方法铺平了道路。
版权文章,未经授权禁止转载。详情见 转载须知 。

本文地址: https://www.gpxz.com/article/ec0ed7e92422309f700a.html



视频服务平台,提供视频播放,视频发布,视频搜索,视频分享

途牛旅游网-中国专业全面的旅游网;提供自助游(自由行),国内旅游,出境旅游,自驾游,公司旅游。低价保证,专业服务,九大出游保障,服务超百万人出游

福昕云模板官网

百饮油价网提供最新的全国各个城市的92号汽油价格,95号汽油价格,98号汽油价格,0号柴油价格等国内汽油价格查询和柴油价格的查询,每天时时更新,为你提供最新的油价调整信息。

信息安全产品与整体解决方案提供商

宏奥卷帘门风淋室厂家为客户提供更好的快速卷帘门风淋室批发货源,可提供非标尺寸的订购。咨询热线:189-7131-0042~

大连中原仪表厂

可凡下载站(11月17日)打造齐全的安卓app软件大全。我们每天更新大量安卓应用app,安卓游戏等。下载安卓软件和安卓游戏,就来可凡下载站!

爱漂洋跨境导航是一个推荐优质跨境电商软件和服务的导航平台,基于独立站、平台、卖家、服务商的不同角色,构建跨境电商生态的服务导航,我们的使命是让跨境卖家出海变得更加便捷,以卖家的需求为中心,提供实用的跨境资源对接、活动、资讯、选品、工具、电商平台、跨境支付、收款平台、物流及运营经验,集合跨境电商出海所需的一切资源门户网站。

企孟云销售管理系统,客户管理,客户公海,客户跟进,合同订单,财务款项管理一目了然,软件一次购买终身使用,私有化独立部署,我们专注于提供更简单好用的客户管理软件,支持高端定制开发,同时提供免费版永久免费使用!

我厂主营巴氏合金生产,兼营各类轴瓦、轴套、托瓦离心浇铸及技术服务

首页_畅享信息_政务服务领域信息化建设解决方案提供商

合成大西瓜是一种合成水果的休闲游戏,玩家需要从小型水果开始合成,合成出大西瓜就能过关了,那么免费的合成大西瓜的游戏叫什么?手游中有很多跟合成大西瓜类似的游戏,小编今天找到了五个类似于合成大西瓜的游戏,欢迎大家下载这些合成类的休闲游戏,1、,放置合成大西瓜,这款手游可能就是玩家要找的合成大西瓜的游戏,游戏中会掉落很多圆形的水果,比如草莓...。

在刘强东的带领下,京东已成国内第二大的电商平台,员工人数超过16万,刘强东曾表示,未来的几年,京东将全面转型为技术公司,未来在京东员工数量减半,每天只需工作2,3小时,将全面实现,无人公司,而在人才标准的选择上,如何打造属于自己的精英团队,刘强东有自己的看法,在,刘强东自述,我的经营模式,中,刘强东提到,这四类员工,必须尽快清除掉,...。

520的浪漫是玫瑰和咖啡缺一不可,近日,万咖啡,WanVita,推出新品咖啡——粉红拿铁,助力520爱的表达,萃取棚晒阿拉比卡咖啡豆,加入新鲜牛奶和超级食物甜菜根粉,制成爱意满满的红粉拿铁,颜值和风味俱佳,一杯红丝绒质感的粉红拿铁,用粉红的色彩唤醒人们内心深处的天真烂漫,万咖啡招牌饮品粉红拿铁,2020年,万达酒店及度假村在宁波万达美...。

AIoT融合落地方兴未艾,工业制造智能转型迫在眉睫,为了构建行业对AIoT产业的全新认知,解析AIoT泛产业的,云、管、边、端,及智能制造产业的发展,探讨当下AIoT行业落地困境及工业互联网发展思路,2019年11月22日,全球AIoT产业·智能制造峰会在深圳隆重举行,本次会议由雷锋网主办,由深圳市软件行业协会、深圳市大数据产业协会、...。

很多人都说,牙疼不是病,疼起来真要命,其实这句话并不完全正确,生活中很多小病小痛都是极其困扰人的,比如鼻炎,不仅影响自身生活,而且也影响外貌工程,但是现今鼻炎治还是比较困难的,大部分只是靠调理,方老祖鼻炎馆作为专业可靠的养生调理机构,自品牌建立以后收获粉丝无数,成功打出了招牌来,这不还有人问起了方老祖鼻炎馆怎么加盟的问题,关于方老祖鼻...。

申明,1.以上内容仅代表揭发者自己,不代表黑猫揭发立场,2.未经授权,本平台案例制止任何转载,违者将被清查法律责任,3.黑猫揭发处置揭发不收取任何费用,凡以黑猫揭发名义不要钱的均为混充、诈骗行为,请及时报警并与黑猫官网反应,揭发邮箱heimaotousu@vip.sina.com,4.请大家选用官网渠道处置生产纠纷,不要轻信第三方机构...。

奥迪A5是一款什么样的车型,<,奥迪A5是一款定位为中级的跑车系列,关键蕴含A52.0T、A53.2Coupe和A53.2Coupequattro等型号,其中,A52.0T<,的售价在人民币52.05万至52.5万之间,而更上流的A53.2Coupe定价在64.00万至67万,而旗舰车型A53.2Coupequat...。

奇瑞总公司电话拨打,而后依据语音揭示操作,选用4-智能语音ca询,就可以了!奇瑞旗下有几大品牌,包括四大品牌中端品牌,奇瑞上流品牌,瑞麒微面品牌,开瑞SUV品牌,威麟奇瑞官方网站奇瑞A113是新款奇瑞A11,3ACTECO发起机,奇瑞的新款战略小车,形状十分时兴,能源也很短缺,发起机没得说,微弱~!内饰和钣金的做工,我以为是奇瑞目前最...。

1、首先登陆网络,搜查输入法称号,比如搜查,网络输入法,2、其次点击下载,选用下载位置,3、而后装置即可,QQ是腾讯公司推出的一款基于互联网的即时通讯平台,允许在线聊天、即时传送语音、视频、在线,离线,传送文件等全方位基础通讯配置,iPhoneQQ输入法怎样装置iPhone装置QQ输入法手机上的输入法特意多,有系统自带的,也有第三方...。

solidworks博士钣金插件是一款功能强大的solidworks设计辅助插件,能够有效地提高大家的工作效率,让钣金设计工作更加轻松高效。软件提供了各种辅助功能,可以帮助用户轻松完成各种设计需求,还有详细的使用教程,轻松上手使用。

影响电话销售成功率的因素是有很多方面的下面我们逐一进行分析第一产品这里的产品指的是大产品概念包括产品定位质量价格市场空间知名度美誉度认知度等并不是所有的产品都适合做电话销售比如快速消费品就不适合因为它的利润比较低客户群广更加适合大众营销和现场销售促进使用价值小知名度低的产品也不适合电话销售因为电话销售有它难以避免的缺陷...

感受高质量发展活力共盼杭州亚运盛会——记亚洲国家驻华使节浙江行,驻华大使,浙江,使节,泰国,总领事

相信有很多小伙伴在日常生活中都需要有一个能够对音频进行编辑和处理的软件,那今天小编借着这篇文章为大家介绍音频拼接软件免费哪个好用,希望可以通过这些软件满足大家对音频进行拼接或者是其他处理的需求,操作都非常简单,轻松点击就可以快速看到效果了,喜欢的小伙伴们可以直接点击下方的按钮下载体验,1、,音频剪辑,音频编辑和处理的专业神器,可以满足...。

近年来,超分辨率是计算机视觉领域的一个经典概念,其画像增强去噪、细节恢复等无不展现了技术的突出优势,在监控设备、卫星图像、医学影像和视频复原等方面都有着重要的应用价值,目前,我们常用的一些电视、投影仪等智能设备中也能看到这项技术,那究竟超分辨是什么意思,下文就来简单介绍超分辨技术的原理及其场景应用,超分辨率是什么意思,超分辨率指将低分...。

10月19日消息,小米现推出了一款85英寸的小米电视APro,小米商城显示为5999元,配置方面,这款电视采用了四核的Cortex,A55CPU、G52,2EE,MC1GPU,配备3GB内存以及32GB存储,支持双频WiFi以及蓝牙5.0,小米电视APro85采用了85英寸的4K面板,可视角度达178°,分辨率为3840×2160,开...。

至此,开一个包子店要多少钱,如何做包子好吃,小编的以上详细介绍,相信大家已经了解,其实,包子虽然很小,但是已经完全融入了我们的生活,且将作为中华文化的一种,恒久传承,如果大家有心加入,那么,心动不如行动!...。

闲暇之余,在家读几本好书,不仅能修心养性、陶冶情操,还能开阔视野,学到丰富的知识,所以,居家生活少不了书本,也少不了书柜,那么,如何才能选购一个好的定制书柜呢,拉斐尔全屋定制为您支招!首先,选择款式市场上常见的书柜款式有独立式书柜、嵌入式书柜、转角书柜等,独立式书柜,优势就是适应性强,无论放在哪里都适合,在一个地方放久了想换位置能直接...。
