语言模型如何适应机器人 行胜于言 (语言模型如何把token变成向量)

Google Brain的机器人团队(Robotics at Google)最近发布了一篇文章,介绍了他们如何将大规模语言模型的“说”的能力和机器人“行”的能力结合在一起,从而赋予机器人更适用于物理世界的推理能力(physically-grounded)。
面对对方“我不小心洒了我的饮料,你可以帮我一下吗?”的问题的时候,你会怎么反应?
你评估一下当下的环境,可能会帮对方把饮料瓶收拾掉,如果周围有抹布,你会拿起抹布帮他收拾干净,当然这些一步一步的指令可能会在你的心中默念一遍。
当你没有观察到吸尘器在周围时候,你显然不会告诉对方要使用吸尘器收拾,因为那不符合当下的环境条件。
这样的行为决策已经体现了两个步骤:面对一个求助,你拥有一些可以解决当下问题的行为候选项,然后你还得实际下来,选择最符合现实的那个行为。
放在机器人的语境下,在前一个步骤,我们需要一个语言模型去理解一段人类语言发出的指令,并“说出”我们可能的种种解决方案;第二个步骤需要结合周围环境,挑出那些符合现实世界的方案。
这篇文章就是试图将这两个行为解耦出来,并以恰当的方式结合在一起。
首先是用于理解和生成可能的候选项的第一步。很自然地,文章使用了现在在自然语言处理领域很流行的大规模语言模型(LLM)。它可以是生成式的,即面对一个问题,生成可能的问答,如下图所示:
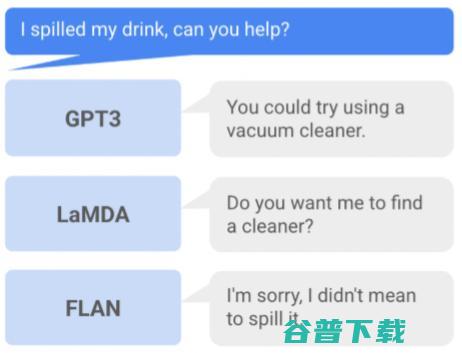
可以看出这种生成式的结构并非适用在面对行为的机器人领域,一方面如FLAN模型输出的结果没有明确的行为指令;另一方面,即使像GPT3中给出了具体的做法,它仍然没有考虑到现实场景:万一当下没有吸尘器呢?
就像开头想表达的:会说什么并不重要,重要的是可行吗?
因此,第二个步就需要考虑机器人所处的环境、它能够完成的行为、它当下拥有的技能等等了,这些往往采用强化学习的value function(VF)或者affordance function进行评估。
如果将第一步的LLM视作是可以思考和讲话的“心和嘴”,后一步的affordance则充当了“眼和手”的功能。前一步“说”(Say),后一步判断“能”(Can)做什么,文章将这一模型起名为SayCan。
从上文所述文章方法的关键是如何将没有与现实世界结合的“理想化”的LLM变得更加“现实”。只是根据一段指令,采用对话生成的方式产生一段虽然合理但是无关的语句并非我们所要的。因此,SayCan采用了prompt以及给特定行为打分的方式。
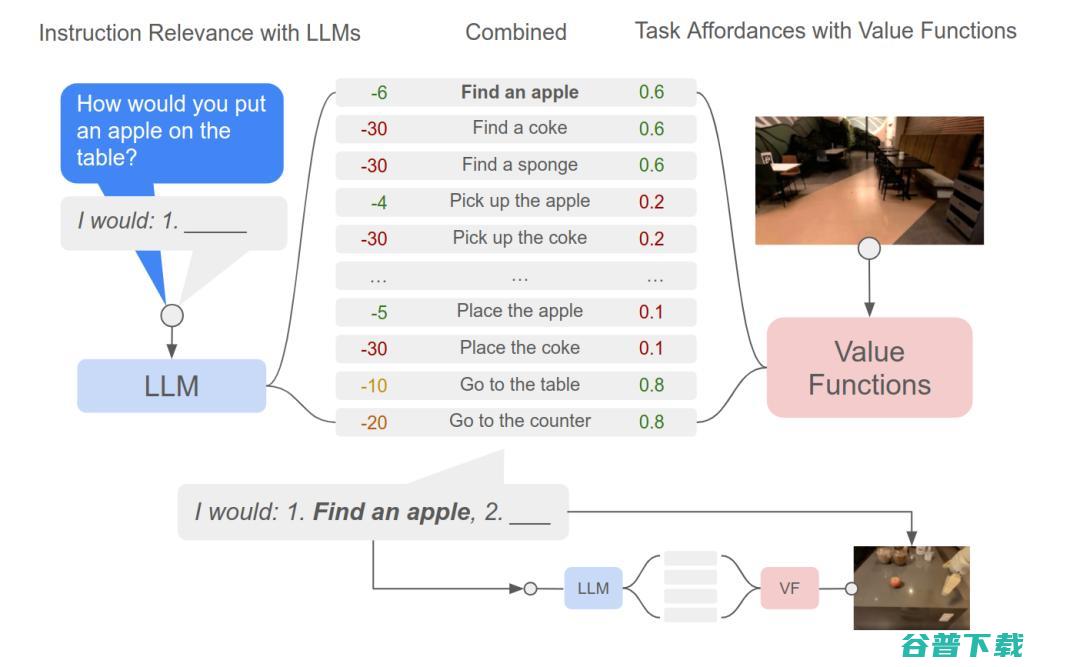
具体而言,机器人先观察周围环境,利用VF找出一些可行(Actionable)的行为候选项。LLM根据问题和一小段prompt对于这些行为进行打分。
VF和LLM打出的两个分数的乘积作为最终选择该行为的置信度,挑选出最高得分的行为作为这一步选择的行为。
之后,将当前选择的行为在接到上一步的回答模板中,作为下一步的模板输入,继续重复上述的动作,递归式推断之后的行为,直到最终推断出一个结束的标志。这一过程,可以参考下图。
选择行为的流程示意图
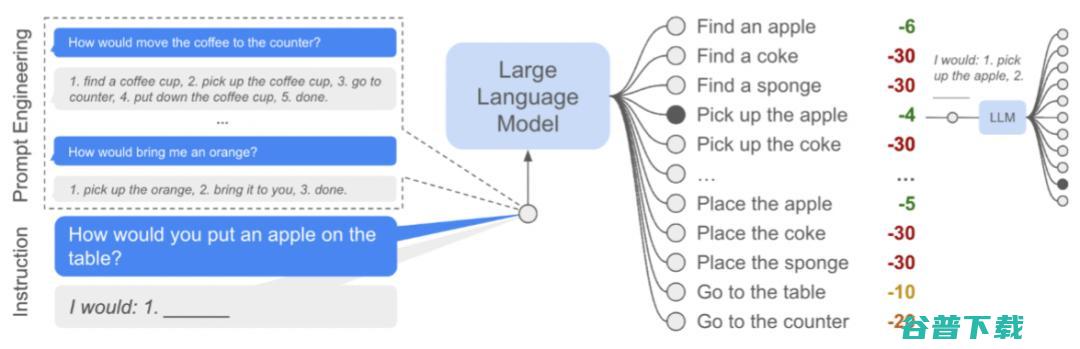
如下图所示,LLM采用模板“I would:1.”作为回答“How would...”问题的命令词汇(prompt)。值得注意的是,文章中也提到,这样以比较标准的方式开头的对话都是在机器人语境下专门设计的,现实场景可能会更加复杂。除此之外,用于in-context learning的例子也由类似的语句构成,为了让模型生成语句时候有所参考,也就是图中的:prompt engineering的部分。
之后的LLM是针对预选好的行为进行打分,是一种类似分类或者检索的方式,而不是生成式的。
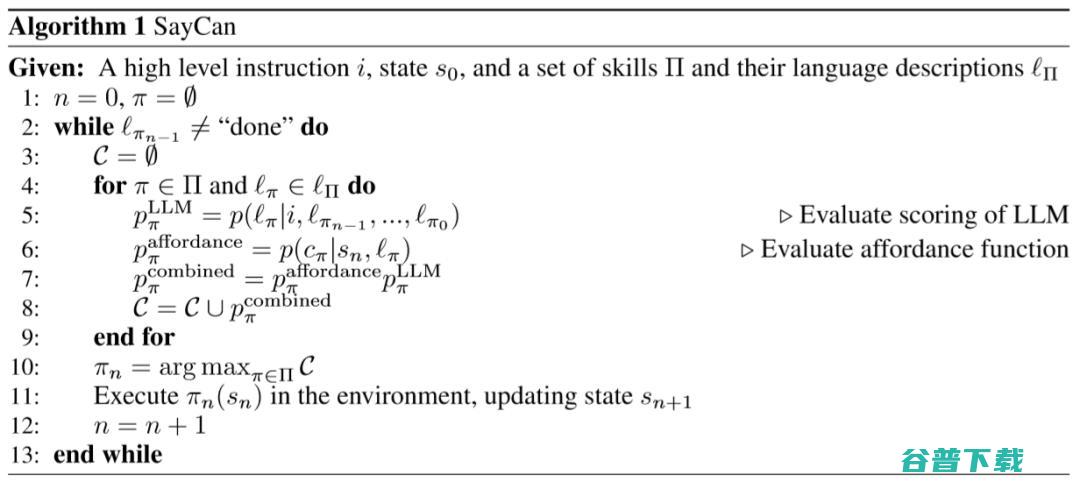
整个实现可以参考如下的伪代码:
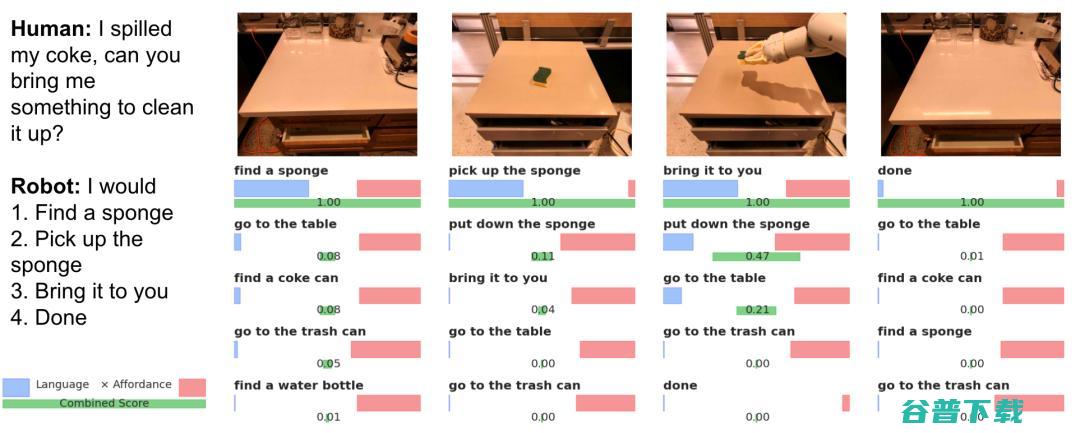
文章在模拟的厨房和现实的厨房做了测试,这包括101个由不同语言指令构成的任务,下面展示了一些SayCan完成的例子,作为给出了人类的指令,右边则是机器人根据LLM和VF共同解码出来的指令序列。蓝色的条图表示LLM对于特定动作得到的概率打分,右边则是通过VF得到的分数。
人类:我洒了可乐,你能帮我用什么清理干净吗?
机器人:我会1)找到一块抹布。2)拿起这块抹布。3)把它带给你。4)完成。
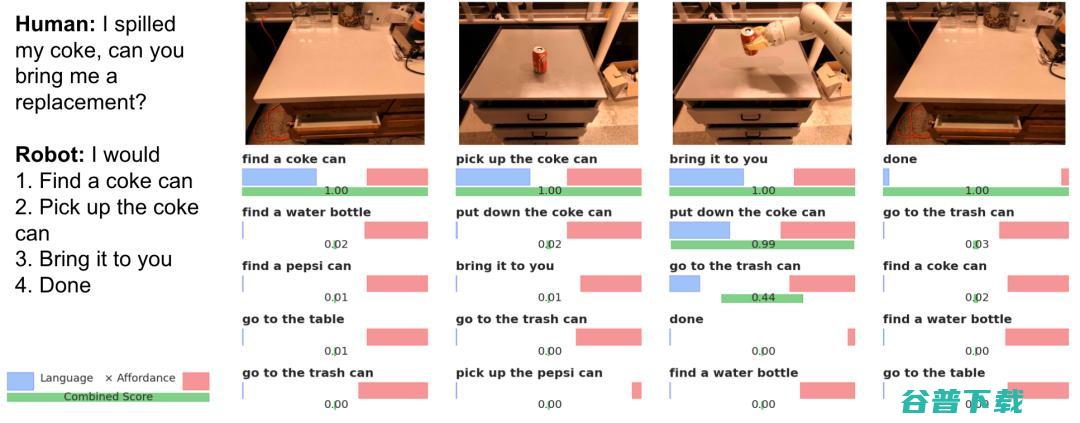
人类:我洒了可乐,你能帮我重新拿一罐吗?
机器人:我会1)找到一罐可乐。2)拿起这罐可乐。3)把它带给你。4)完成。
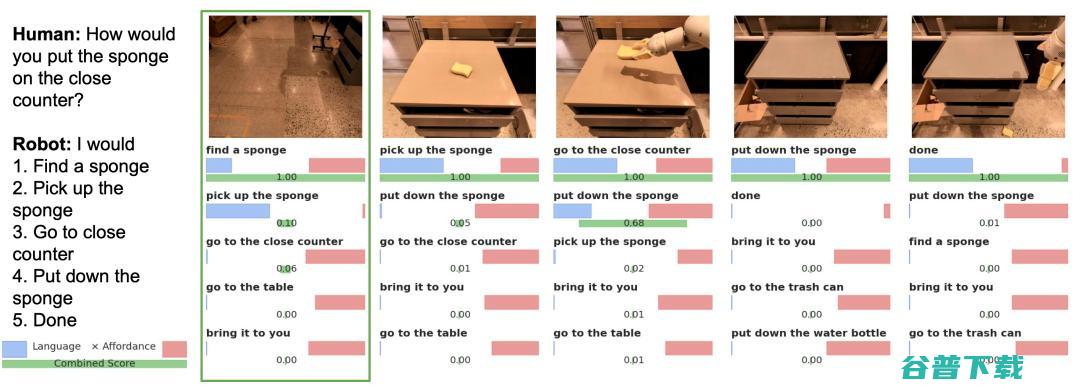
人类:你会怎么把抹布放在衣柜上
机器人:我会1)找到一块抹布。2)拿起这块抹布。3)走到衣柜附近。4)完成。
其中场景三的第一步的选择尽管语言模型给出了“pick up the sponge”的最佳选项,但当机器人什么都没有看到时,VF则给这个选项很低的得分。这说明了SayCan的语言部分可以做出对于物理世界的推理。同时有趣的是,最后一个动作,“笨拙”的机器人还是没有做成功:它把海绵抹布掉到了地上。
更多视频可以参考网站:
SayCan将使用强化学习的“行”的能力和大规模语言模型的“言”的能力结合在一起,突出了“行胜于言”的背后思想——仅仅发出可能的行为指令是不够的,还需要结合外在的周围环境,做可以做到的。不过,文章提出了如下的问题,作为未来的思考方向:
1)如何借鉴融合了真实世界的LLM,来进一步完善语言模型本身,如提高它对于世界知识的推理能力。
2)更为本质的,适用于人类的自然语言是否真的是用于机器人编程的本体(ontology)语言?
3)如何更好地在机器人领域融合自然语言理解技术?
可以来到,目前机器人的研究已经逐渐在“软件”算法层面发力了,而且上游的AI算法也很快地应用到这一领域,期待它的更好发展。
版权文章,未经授权禁止转载。详情见 转载须知 。

本文地址: https://www.gpxz.com/article/f0ec47e1845e1930b339.html



J&T极兔速递是一家全球综合物流服务运营商。公司创立于2015年,快递网络覆盖印度尼西亚、越南、马来西亚、菲律宾、泰国、柬埔寨、新加坡、中国、沙特阿拉伯、阿联酋、墨西哥、巴西、埃及共13个国家。秉承“客户为本、效率为根”的宗旨,J&T极兔速递致力于通过智能化的基础设施,数字化的物流网络,为客户提供全场景化的物流解决方案,以高效连接世界,让物流惠及全球。

咸阳新闻网,咸阳数字报,咸阳日报,数字报,电子报


鄂州市劲龙金刚石工具有限公司是一家专业从事生产切割石材、混凝土、陶瓷等专用工具的私营企业

安思创科技有限公司是中国优秀的电子元器件分销商之一,我们致力于为全球汽车主机厂,汽车零配件制造商,终端,代工厂等客户提供现货,订货成本降低以及呆滞库存处理等服务。

中国航天科工集团有限公司

尾霸是一家专业从事摩托车铝合金尾架改装、开发、生产的高科技服务型公司。

26游趣手游网为广大用户提供最新最热门的手机游戏和安卓软件下载,所有资源全部免费绿色安全,这里有最新、最热门的安卓手游推荐、热门游戏攻略,热门软件下载,欢迎广大用户下载体验!

金网国际教育学院作为国际高端教育资源的输出平台,致力于国际免联考硕士和博士教育、国内在职研究生课程班、党员干部思政教育、企业家商学思想及经营实践教育、企业全员管理实践教育、海外留学/移民和语言培训等高端教育项目的营运。

中龙鸿展专业提供结构设计,电话:13910867774加固设计,结构加固设计,钢结构设计,别墅加固设计,别墅扩建设计,阁楼加固设计,旧楼加固设计,抗震加固设计,钢结构夹层设计,楼房加固设计等业务欢迎大家来电咨询。

深圳市壹体国际货运代理有限公司

淮安阀门品牌供应商,主要做各种淮安阀门批发市场销售,包括淮安阀门管件批发,淮安消防阀门,闸阀,蝶阀,截止阀,止回阀等等,种类齐全,欢迎大家来电咨询。


华为注册大量鸿蒙OS相关商标鸿蒙概念股开盘大涨华为回应近日,国家知识产权局商标局网站显示,华为技术有限公司申请了多个与HarmonyOS有关的商标,包括HUAWEIHarmonyOS、HarmonyOSConnected、HarmonyOSLinked等,随后,有消息称,搭载鸿蒙OS的手表等终端产品或于不久后发布,受此影响,华为鸿蒙概...。

12月28日,三六零,601360.SH,下称,360,发布对外投资进展公告,已与哪吒汽车各股东方签署有关协议,以支持哪吒汽车股份制改造,公告披露,哪吒汽车的股改基准日为2022年10月31日,股份公司预计于2022年12月31日完成设立,此前360发布公告称,为优化标的公司股权结构,完善哪吒汽车治理机制,决定将哪吒汽车部分增资权平...。

发表在米家投影仪2022,4,1217,41小米全色激光影院采用了RGB三色激光光源,显示技术是LCOS,并不是之前采用过的DLP技术,所以不少网友对小米全色激光影院的表现也是非常期待,目前我们已经拿到了产品,先做一个简单的小米全色激光影院评测开箱,后续将会发布全片的小米全色激光影院测评,1.小米全色激光影院评测开箱2.小米全色激光影...。

发表在行业动态2018,12,2114,02据奥维云网报告显示,激光电视实现了上半年市场规模同比增长241.5%,领跑电视细分市场,尤其在80吋以上市场,激光电视销量占比达60%以上,据悉,今年上半年激光电视形势喜人,销量应该超过去年全年6.7万台,大约在7万台上下,半年就抵去年全年度的量,在多数行业人士看来,幕后的最大的推手就是价格...。

发表在光学屏幕幕布2024,3,1217,22玩大屏投影,想看到惊艳画面,其实很简单,解决三个画质核心点,清晰度、亮度增益、画面对比度,在家就可坐享影院级视听体验!菲涅尔光学屏幕关于清晰度和亮度增益的要点,要选择真正在物理层面支持4K清晰度的投影屏幕,才能看到4K画面,菲涅尔结构加工精度必须足够;亮度增益数值并不是越高越好,菲斯特光学...。

酒水是餐桌上必不可少的饮品,可以彰显出饭桌文化,广大消费者对传统酒水的依赖和喜爱程度,促使白酒行业发展了上千年,如今依然熠熠生辉,并且涌现出了众多酒水品牌,一些对传统酒水行业感兴趣的加盟商,就会了解不同的酒水品牌,其中民族心酒就是不错加盟选择,除了这个酒水品牌以外,大家还会咨询民族心酒加盟店品牌有哪些,民族精酿是民族心酒推出的自主品牌...。

为啥百度和谷歌几乎同时成立,现在发展却截然不同呢?也就一年半的时间差,怎么一个最终成了全球科技玩家眼中的圣地,而另一个沦落到人见人嫌名声败坏了呢,这事还要从两家公司的差距说起,谷歌成立于一九九八年九月,如今市值一点四七万亿美元,创新力惊人,是目前全球最顶尖的科技公司之一,百度成立于两千年一月,现在市值五百一十亿美元,可以说几乎毫无创新...。

原题目,任建新同志遗体在京火化习近平李强赵乐际王沪宁蔡奇丁薛祥李希韩正等到八宝山反派公墓送别任建新同志病重时期和逝世后,习近平李强赵乐际王沪宁蔡奇丁薛祥李希韩正胡锦涛同等志,前往医院探访或经过各种方式对任建新同志逝世示意沉痛哀悼并向其亲属示意深切慰劳新华社北京9月25日电中国共产党的低劣党员,久经考验的忠实的共产主义兵士,我国政法阵线...。

二手车市场越来越炽热,而在这个市场中,58同城作为一家有着良好信誉的网络平台,为许多二手车买卖者提供了便利,但是,在买卖二手车时,不少人会遇到很多不懂和困惑,当天就让咱们一同来看看,如何在58同城上顺利买卖二手车,1、详细阅读车辆消息,在找到心仪的车辆后,第一步就是要仔细阅读车辆消息,了解车辆基本状况、车龄等消息,以及其余卖家公示的详...。

爱奇艺TV版本是爱奇艺专为电视,盒子,用户打造的一款超清TV软件,画面更明晰、播放更流利、界面更友好!最新电影、3D大片、最热电视剧、1080P高清,天天降级,最全独家动漫、海量综艺文娱内容,收费观看,纪录片、音乐、片花、时兴、生存、旅行、搞笑、体育、教育、财经等十多个频道,多样精彩,为您出现,爱奇艺TV,让电视更难看!注,因为不同品...。

汉印n41bt打印机驱动是一款专门针对汉印旗下的同名打印机产品推出的官方驱动程序,这款打印机具备了便携式、兼容性强等特点

天风证券同花顺新一代专业版,天风证券同花顺新一代专业版采用大众化界面,支持行情交易统一登录,界面友好,行情速度快,资讯丰富,功能强大,是目前最好的股票证券分析交易软件之一,完美下载为您准备了“天风证券同花顺新一代专业版”,欢迎大家前来下载使用

账号内容布局,注册好自己的TikTok账号之后,我们需要针对性对我们账号进行内容布局,结合自己产品用户与平台的特点,去布局账号内容,可以针对性做几款产品,做垂直系列内容,展现内容爆点,去吸引一大波粉,把账号流量支撑起来,分析当前热门话题,以及种草热门标签视频吸粉,像近期的TikTok上被一些像淋浴手机支架,、,流氓狗数据线,等视频被大...。

转自丨博客园作者丨计算机的潜意识神经网络是一门重要的机器学习技术,它是目前最为火热的研究方向——深度学习的基础,学习神经网络不仅可以让你掌握一门强大的机器学习方法,同时也可以更好地帮助你理解深度学习技术,本文以一种简单的,循序的方式讲解神经网络,适合对神经网络了解不多的同学,本文对阅读没有一定的前提要求,但是懂一些机器学习基础会更好地...。

蒙娜丽莎瓷砖立足建材行业已有多年之久,公司推出的瓷砖产品设计新潮、品质过硬、定价合理,在一众同类产品中具有鲜明的优势,吸引广大民众的强烈关注,而产品销量也随之稳步上升,为向各位读者推荐该品牌,本文将围绕蒙娜丽莎瓷砖加盟电话展开清晰解答,给有需要的读者提供必要主张,蒙娜丽莎瓷砖加盟电话如创业者看好项目前景准备介入行业打拼,可在品牌页面了...。

为别人打工远比不上自己创业,尤其在有资金条件的前提下,只是创业选什么项目还是有一定争议性的,如果有了30万元的资金成本,能够从事市场上哪一比较有发展前景的项目,30万元做什么生意好,30万元在创业市场不是一个特别多的数目,但也不是很少了,至少盘下店面准备物资正式开业这流程不存在问题,只不过,各个项目的发展前景不一样,若是30万元左右资...。

直播吧9月7日讯世预赛18强赛首轮,国足客场0,7惨败日本队,赛后,前国脚张辛昕以为这样的比分不能接受,张辛昕示意,首先比分是没法接受的,一切人都接受不了这个比分,怎样会踢成这个样子呢,赛前我感觉大略是三个球的差距,这是比拟反常的一个实力表现,没想到较量踢崩了,我看说什么的都有,说教练不行、阵型不对、防卫位置错误、低级错误、拼劲无余...。
