Finn团队推出BID新算法 Chelsea 家务机器人或将再更新 机器人一键变聪明 (fine团队)
斯坦福大学的 Chelsea Finn 团队又出新成果了。
Chelsea Finn 团队一直是斯坦福走在具身智能研究前沿的团队之一,之前火遍全网的 ALOHA 炒菜机器人就是出自这个团队之手。团队领头人 Chelsea Finn 的创业公司 Pi 更是创立不到一个月就拿下来自红杉资本、openai 等公司的7000万美元融资。
最近,Chelsea Finn 团队在研究中发现,虽然延长动作块能够提升策略捕捉时间依赖性的能力,但这样做会减少对机器人近期状态的观察,导致在随机环境中更容易出错。
为了克服这个难题,他们开发了一种双向解码(Bidirectional Decoding, BID)新型算法。BID 能将动作块化与闭环操作相结合,通过在每个时间步采样多个预测并寻找最优化的一个,增强扩展序列的时间一致性,同时在随机环境中实现自适应重新规划。
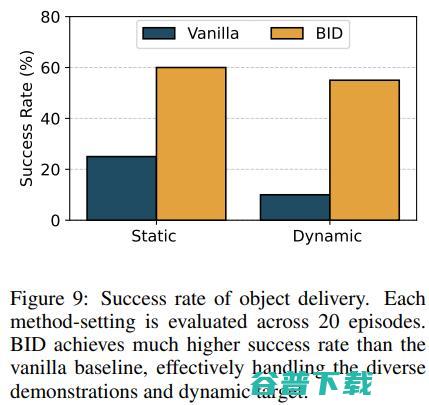
为了验证 BID 算法的效果,他们在 Franka Kitchen 数据集上进行了模拟测试,发现机器人在家庭环境中的表现还不错。他们还用 Franka Panda 机器人做了真实实验,结果显示 BID 显著提高了机器人在目标移动时的放置成功率。
这些测试不由得让人联想到了他们之前做的炒菜机器人,也许这个团队正计划把 BID 应用在 ALOHA 上,准备给家务机器人来个全面的技术升级。
值得一提的是,这个团队中有一半都是华人面孔,之前开发 ALOHA 的也全是华人学生。
目前,论文已在arXiv公开,相关代码也已开源。
论文标题:Bidirectional Decoding:Improving Action Chunking via Closed-Loop Resampling
论文地址:
项目网站:
代码地址:
论文概览
研究问题
本文旨在解决机器人学习中的挑战,特别关注动作分块,即在没有中间重新规划的情况下预测和执行动作序列的过程,这些序列通常来源于人类示范。面临的挑战包括在捕捉时间依赖性与对随机环境中意外变化的反应之间的权衡,以及不同示范之间的风格变异性较大。
该研究的动机在于通过对动作分块进行更深入的分析和提供实用的解码算法,来增强机器人系统的学习和执行过程。所要解决的问题包括:
动作分块中时间依赖性与反应性之间的权衡
不同示范之间的风格变异性较大
需要一种实用的解码算法以提升机器人行为克隆的性能。
提出的方法
本文提出了双向解码(BID)方法。
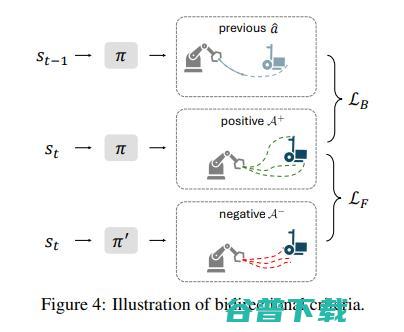
BID 是一种推理算法,将动作分块与机器人学习中的闭环操作相结合。它在每个时间步采样多个预测,并基于向后一致性(与先前决策的对齐)和向前对比(与更强策略的结果的接近度)来优化选择。
这种综合方法增强了长动作序列的时间一致性,同时保持了适应动态环境变化的灵活性。BID在各种机器人任务中显著优于现有的闭环方法,代表了机器人系统学习和执行过程的重大改进。
实验与结果
数据集
本文在三个数据集上进行了实验:Push-T、RoboMimic 和 Franka Kitchen。

对于Push-T数据集,本文在七个任务上评估了所提出的双向解码(BID)算法,包括将物体放入人类手持的杯子中。实验中使用的机器人是Franka Panda,配备了两台相机,提供256 x 256像素分辨率的视觉观察。本文还评估了BID在大批量和现有推理方法下的可扩展性和兼容性。
对于RoboMimic数据集,本文使用了五个任务,即Lift、Can、Square、Transport和Tool Hang。每个任务的训练数据集包含300个从多个人类展示中收集的回合。
对于Franka Kitchen数据集,本文在涉及四个或更多物体的测试案例上评估了学习到的策略,这是一个具有挑战性但在家庭环境中实际应用的机器人操作任务。
真实世界实验
本文还通过两项现实世界实验进一步评估了提出的 BID。
动态放置实验
他们共收集了150个展示回合,包括50个干净且一致的展示和100个嘈杂且多样的展示。实验中使用的机器人是 Franka Panda,并采用基于视觉的扩散策略进行操作。
机器人的任务是将其抓手中的物体送入人类手中的杯子中。每次展示包括四个主要阶段:(a) 随机初始化机器人位置,(b) 接近目标杯子,(c) 在目标杯子附近减速,(d) 释放物品。目标杯子的位置可能会在展示过程中发生变化。
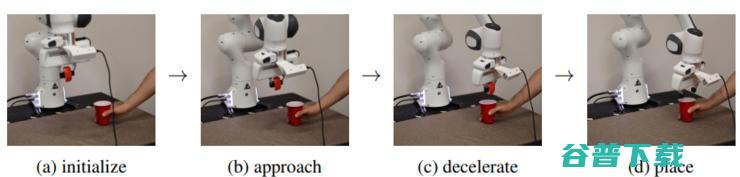
值得注意的是,BID 在动态设置中的成功率与静态设置相似,这表明它有可能将动作块扩展到不确定环境中。
动态拾取实验
本文评估了不同方法的性能,包括普通的开环和闭环采样、BID 的开环和闭环采样,以及 EMA 的闭环采样。
机器人的任务是拿起一个杯子,并将其放在附近的碟子上。四个主要阶段是:(a) 初始化机器人,(b) 接近目标杯子,(c) 抓住目标杯子,(d) 拿起杯子,(e) 将杯子放到目标碟子上。目标杯子的位置可能会在一个过程中发生变化。
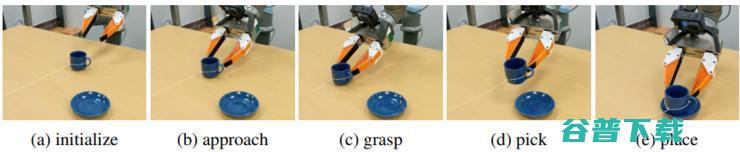
结果表明,在动态环境中,相比其他方法,BID 的成功率至少提高了2倍,同时在静态环境中保持了其性能。
BID技术解读
动作分块有利于对展示中的时间依赖性建模,但却牺牲了对随机环境中意外状态的反应能力。他们选择通过闭环操作衔接长的动作块来解决这一问题。
他们的主要假设是,虽然任何一对样本共享相同潜在策略的概率很低,但从大量样本中找到一致的一对样本的可能性要高得多。这种直觉促使他们将闭环动作分块问题理解为在每个时间步采样的一批计划中寻找最优动作。
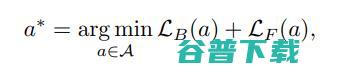
其中 ? 是动作块集合,ℒ? 和 ℒ? (B和F都是下标,飞书文档打不出来)是两个衡量时间依赖性的标准,接下来将会详细描述这两个标准。
ℒ指的是逆向一致性。
这里,ρ 是一个衰减超参数,用于解释不确定性随时间增长而增加的情况。这种后向损失鼓励相邻步骤之间采用类似的潜在策略,同时允许逐步适应不可预见的过渡动态。
指的是正向对比度。

其中 ?+=?∖{?} 是强策略 ? 预测的正集合,?− 是弱策略 ?′ 预测的负集合,而 ? 是样本大小。
下图展示了逆向一致性和正向对比度标准对样本选择的影响。
由于 BID 中的所有步骤都可以并行计算,因此在现代 GPU 设备上,总体计算成本仍然适中。
团队介绍
Chelsea Finn

Chelsea Finn 博士毕业于加州大学伯克利分校,师从Sergey Levine。她曾在 Google DeepMind 工作过 6 年,现在担任斯坦福大学计算机科学与电子工程系的助理教授,也是 Pi 的联合创始人。
Chelsea Finn 的研究兴趣是机器人和其他代理通过学习和交互发展广泛智能行为的能力。她的实验室 IRIS 专注研究大规模机器人交互智能,隶属于 SAIL 和 ML Group。
团队其他三位华人学生包括:
Yuejiang Liu

Yuejiang Liu 是 IRIS 实验室的博士后,博士毕业于瑞士洛桑联邦理工学院。他专注于研究自监督学习、因果表征学习和测试时间适应,并将其应用于计算机视觉和多代理系统。

Annie Xie 毕业于加州大学伯克利分校,曾在伯克利人工智能研究 (BAIR)实验室和 Sergey Levine 一起工作,现在是 Chelsea Finn 指导的博士生。她的研究重点是开发在最少人工监督下学习的机器人系统。
Maximilian Du

Maximilian Du 今年学士毕业于斯坦福大学,主修计算机科学、心理学(辅修)和创意写作(辅修),在 Chelsea Finn 的 IRIS 实验室从事机器人学习工作,现在是 Chelsea Finn 即将入学的博士生。
版权文章,未经授权禁止转载。详情见 转载须知 。

本文地址: https://www.gpxz.com/article/0e7cc4a7fdd9e7150827.html



上海生活服务网站排名,根据网站的综合值按照不同的上海生活服务网站进行筛选排名结果,通过筛选上海生活服务网站可以看到每个上海生活服务网站里面的网站排名优质的网站是哪些

AI星踪岛,源自已运营13年、服务千万用户的优设网,是我们倾力打造的一站式AI学习与赋能平台。汇聚全球优质AI人才、工具、教程与资讯,旨在为每一位AI学习者筑起一座值得信赖的内容岛屿,助您在AI时代乘风逐浪持续进化。

我们是一家专业的早教网站,致力于为宝宝提供全面的早教教育服务。通过科学的早教方法和丰富的教育资源,帮助宝宝获得全面的成长。立即访问我们的网站,了解更多关于早教的知识和资源。

空气净化系统供应商

招聘研究网是由一群热爱招聘、热爱公益事业的人力资源从业者所创建的一个公益性组织,成立于2008年8月28日。招聘研究网目前是国内领先的招聘知识传播、资源整合、信息交流的专业网络社区媒体,为中国及华人社区招聘从业者提供专业交流、资源共享、实战研讨、职业提升的立体型交流平台,致力于推动中国招聘理念、方法和实战水平的提升。招聘研究网以招聘从业者的职业需求为导向,关注每个招聘从业者不同阶段的专业需要,通过专业理论与实践相结合的方式,推动其专业能力的提升。

金刚冷暖设备致力于提供:重庆风管加工、通风管道加工、共板法兰风管加工、螺旋风管加工、角钢法兰风管加工、角铁法兰风管加工等通风管道加工服务,咨询热线:13340299118/18716364545

山东临沂川肯进口刀具,15年专业刀具销售品牌,刀具生产厂家直销各种数控刀片,钻头,铣刀,丝锥,丝攻,板牙,安全夹头,金刚石钻头,镗刀,车刀,pcd刀具,倒角刀,铰刀,卡盘,顶尖,刀柄,U钻,麻花钻,pdc钻头,深孔刀具,锯条,砂轮等,我们承诺所有进口刀具量具刃具均保证正品,假一赔十。

,数码大方是中国自主的工业软件公司,提供数字化设计CAD、数字化管理PLM和数字化制造MES等产品及服务,贯通企业研发设计和生产制造全流程,致力赋能智能制造和数字化转型,推动产教融合引领人才培养,成为中国自主的设计制造数字底座。

浚玮家电百科全力打造家电故障排查知识分享,简单的家电故障维修自己就能解决,空调维修,中央空调,热水器,燃气灶,油烟机,洗衣机,冰箱,电视等家电产品修理技术知识分享,专业维修请找专业技术人员,切不可自行盲目操作

咕咕猪下载站是一家提供手机软件,手机游戏的应用商店,为广大手机用户带来众多应用与手游,网站已有丰富的资源数据,现主要提供Android和iOS应用与手游下载,为用户分享好应用,让用户方便的进行下载,同时发现更多好玩有趣的应用。

智能电动汽车网是为您提供智能电动汽车,智能电动车网,智能电动汽车4S店,智能电动汽车经销商,智能电动汽车报价格,智能电动汽车品牌,智能电动汽车排名的智能电动汽车网站!

菏泽金江新材料有限公司研发的混凝土减胶剂(增效剂)、硫氰酸钠、聚合甘油、矿渣活性激发剂等产品,主要有混凝土减胶剂(增效剂)、硫氰酸钠、聚合甘油、聚合醇胺、乙二醇、聚合多元醇,是建筑建材的节能高新产品。电话:13305301926


哪些APP可以免费下载VIP音乐,为了解决这个问题,小编特地为大家总结了一份免费下载vip音乐的app下载大全2022,通过下面的这几款APP玩家能够下载和分享各种高品质的音乐,拥有免费的艺术享受,是非常值得用户喜爱的应用,1、,QQ音乐,QQ音乐是一款拥有着海量高品质的正版曲库的高质量音乐下载平台,在这个软件当中有各种新歌一级排行榜...。

现在有很多店铺能够以珠宝首饰销售为主,满足市场消费者对珠宝产品的需求,现在也有很多实力品牌公司拥有庞大设计师团队和设计能力,能够做好产品生产销售,爱丽丝珠宝自从创办以来,就是一家有实力的珠宝品牌公司,产品体系很齐全,爱丽丝珠宝有哪些产品,价位如何,这些都是很多创业者和消费者比较关注的问题,爱丽丝珠宝品牌来自于英国,是很有名气的国际珠宝...。

雷锋网讯,11月25日,纷享销客宣布完成新一轮融资,此次融资额度达数亿元人民币,上一轮投资主力金蝶国际继续领投,IDG资本、北极光投资及创始团队跟投增持,同时调整优化了小股东股权结构,此次融资,纷享销客CEO罗旭表示,将主要用于加强产品和平台能力的建设,以及市场与渠道拓展,纷享销客成立于2011年底,最早是效仿Yammer打造的一款企...。

作者,李菁瑛当今,全球数字经济蓬勃发展,各种新兴技术层出不穷,云计算便是其中之一,云计算服务从最初的兴起到逐渐落地到各个行业,经过了黄金发展的十年,一直保持着高速增长的趋势,被视为21世纪最有前景的市场之一,2020年,一场突发的新冠疫情,再次引爆了云计算市场,疫情之下,足不出户,带来了,在线服务,的大爆发,学校在各种云平台上开展在线...。

随着国家对于文旅市场的投入,项目方使用激光工程投影机,造景,的需求非常旺盛,激光工程投影机实现了跨越式的发展,而这背后深层次的背景还得从激光工程投影机自身的特点说起,激光工程投影机具备5大必杀技,亮度高、寿命长、安装简单、柔性显示、色彩好随着光源技术和光阀效率的提升,激光工程投影机已经实现了从4500流明的类工程机到20000流明高亮...。

安装当贝市场U盘安装教程,1.通过当贝市场官网,www.dangbei.com,下载TCL专版软件包2.解压TCL专版软件包后,会有两个apk文件,一个是当贝市场安装包,一个是TCL解除安装限制,后面会用到,将这两个文件复制到U盘中3.将u盘插到上,找到,电视卫视,应用管理,极速安装,,找到U盘4.打开u盘,先将TCL解...。

现在年轻人对珠宝首饰的需求很大,很多有实力的朋友也看好了这一项目,大多数人都会选择品牌珠宝产品购买,同样不少人也看重品牌产品加盟店,珠宝品牌加盟对于现代创业者来说,可以选择的品牌有很多,但是也要根据经营的情况,准备充足的费用,珠宝品牌加盟一般多少钱,珠宝品牌加盟有很多品牌,每个品牌的实力,销售的产品档次,价格范围都不同,所以在筹备店面...。

1、梦见父亲出现车祸的吉凶指数基础安泰,得贵人助力,而在困难之中得安康开展,但成功运之性能不良,难于伸张,故然只是色厉内荏而已,虽苦闷烦恼殊多,但大体可得安康,衣食短缺,幸福有寿,人地两格,无凶数,则身材肥壮,疾病少有,有病吃药即可速愈,中吉,吉凶指数,98,仅供参考,2、梦见父亲出现车祸的宜忌,宜,宜晒太阳,宜穿白色衣物,宜延迟起...。

2020款哈弗h6在智能化性能有搭载Hi,Life智咨询统,基于安保打造的,能够允许64,语义垂类,有弱小的语音识别,有丰盛的在线文娱资源,能够订购外卖、电影票、机票等,2020款哈弗h6智能化性能引见依据关系了解,2020款哈弗h6铂金版搭载了最新的哈弗Hi,Life智能网咨询统,这款智能系统能够允许64和语义垂类等性能,领有弱小的...。

微顶跑腿加盟费多少钱全国外卖跑腿加盟代理微顶跑腿加盟费多少钱全国外卖跑腿加盟代理微顶跑腿加盟费根据不同城市级别是不同的微顶跑腿加盟品牌汇聚多个知名加盟项目为微顶跑腿加盟的创业投资者提供权威参考和专业的加盟指导电话了解更多...

溪口-滕头旅游景区:两个美丽的旅游胜地,滕头,溪口,度假村,人文景观,旅游景区,旅游胜地,自然景观

围观山姆盒马商战,我差点儿破产!,山姆,商战,小红书,1号店,超市

很多人在想的时候应该都梦想自己能成为一名裁缝,这样就可以随意的设计喜欢的衣服样式,还能根据自己的身材制作各种各样漂亮的小裙子,那可以一起看一下自由剪衣服的游戏推荐,可以在游戏中先成为一名小裁缝,在这里各种灵感都能轻松的实现,想要体验自由裁剪衣服的玩家可以看一下下面这几个游戏,绝对都能满足裁剪和设计的需求,在森林中玩家会开设一些裁缝店,...。

可以下象棋的软件中,哪些提供了人工智能,今天小编将针对中国象棋人工智能软件合集2022的内容,详细的为大家推荐十款同类型手机应用,在这些可以和人工智能进行对决得象棋软件内,用户们可以尽情发挥出自己的棋艺水平去进行比拼,1、,中国象棋大师,提供了象棋对战模式的同时,app内还为大家提供了多种象棋教程,帮助各位在提升能力的同时,去挑战更多...。

编者按,近日,谷歌大脑负责人JeffDean在接受Fortune杂志采访时讲述了他对无监督学习和增强学习在人工智能领域应用的看法,雷锋网进行编译,下一次你在使用谷歌搜索引擎或者使用地图导航的时候,你需要记住他们背后有一个很大的大脑为你提供搜索结果,并确保你不会迷路,当然,它并不是一个真正的大脑,而是谷歌大脑研究团队,财富,杂志的Ro...。

2021年5月25日,头部造车新势力理想汽车正式发布2021款理想ONE,实现了配置上的全面升级,在智能电动汽车最关键的自动驾驶系统上,2021款理想ONE使用了两颗地平线最新款征程3自动驾驶专用芯片,在原有的L2级辅助驾驶基础上,实现了NOA导航辅助驾驶的功能,在车企竞相布局智能驾驶的趋势下,理想汽车成为首家基于国产AI芯片实现NO...。

日前,美国著名创业公司孵化器YCombinator,YC,2016年夏季DemoDay如期举行,亮相的新创公司领域涵盖人工智能与机器人、生物科技、教育科技与金融科技等等,而被认为下一个风口之一的Fintech金融科技领域,其增长从2015年夏季YCDemoDay高达26%的比例回落至今个季度大约10%的变化,引起了业界对其未来趋势和方...。
